































อับเดราห์มัน เรเจบ a , อาลีเรซา อับดุลลาฮี b , คาริม เรเจบ c , Horst Treblmaier d,
- a ภาควิชาการจัดการและกฎหมาย คณะเศรษฐศาสตร์ มหาวิทยาลัยโรม Tor Vergata, Via Columbia, 2, Rome 00133, Italy
- b ภาควิชาบริหารธุรกิจ คณะการจัดการ Kharazmi University, 1599964511 Tehran, Iran
- c คณะวิทยาศาสตร์แห่ง Bizerte, University of Carthage, Zarzouna, 7021 Bizerte, ตูนิเซีย
- d School of International Management, Modul University Vienna, Am Kahlenberg 1, 1190 เวียนนา ออสเตรีย
| ข้อมูลบทความ | บทคัดย่อ |
| คำสำคัญ: โดรน UAV การเกษตรแม่นยำ อินเทอร์เน็ตของสิ่ง บรรณานุกรม | โดรนหรือที่เรียกว่ายานพาหนะทางอากาศไร้คนขับ (UAV) ได้เห็นการพัฒนาที่โดดเด่นในช่วงหลายทศวรรษที่ผ่านมา ในด้านการเกษตร พวกเขาได้เปลี่ยนแนวทางการทำฟาร์มโดยเสนอการประหยัดต้นทุนแก่เกษตรกรเพิ่มขึ้นอย่างมาก ประสิทธิภาพการดำเนินงานและผลกำไรที่ดีขึ้น ในช่วงหลายทศวรรษที่ผ่านมา หัวข้อของโดรนเพื่อการเกษตรมี ดึงดูดความสนใจทางวิชาการที่น่าทึ่ง ดังนั้นเราจึงทำการตรวจสอบอย่างครอบคลุมตามบรรณานุกรม เพื่อสรุปและจัดโครงสร้างวรรณกรรมทางวิชาการที่มีอยู่และเปิดเผยแนวโน้มการวิจัยและฮอตสปอตในปัจจุบัน เรา ใช้เทคนิคบรรณานุกรมและวิเคราะห์เอกสารที่เกี่ยวข้องกับโดรนเพื่อการเกษตรเพื่อสรุปและ ประเมินการวิจัยก่อนหน้านี้ การวิเคราะห์ของเราบ่งชี้ว่าการรับรู้จากระยะไกล การเกษตรที่แม่นยำ การเรียนรู้เชิงลึก การเรียนรู้ของเครื่อง และอินเทอร์เน็ตในทุกสิ่งเป็นหัวข้อที่สำคัญที่เกี่ยวข้องกับโดรนเพื่อการเกษตร การอ้างอิงร่วม การวิเคราะห์เผยให้เห็นหกกลุ่มการวิจัยกว้าง ๆ ในวรรณคดี การศึกษานี้เป็นหนึ่งในความพยายามครั้งแรกที่จะสรุปการวิจัยโดรนในภาคการเกษตรและแนะนำทิศทางการวิจัยในอนาคต |
บทนำ
เกษตรกรรมเป็นแหล่งอาหารหลักของโลก (Friha et al., 2021) และกำลังเผชิญกับความท้าทายที่รุนแรงเนื่องจาก
ความต้องการที่เพิ่มขึ้นสำหรับผลิตภัณฑ์อาหาร ความปลอดภัยของอาหาร และความกังวลด้านความปลอดภัย ตลอดจนการเรียกร้องให้มีการปกป้องสิ่งแวดล้อม การอนุรักษ์น้ำ และ
ความยั่งยืน (Inoue, 2020). การพัฒนานี้คาดว่าจะดำเนินต่อไปเนื่องจากประชากรโลกคาดว่าจะสูงถึง 9.7 พันล้านคนภายในปี 2050
(2019). เนื่องจากการเกษตรถือเป็นตัวอย่างที่โดดเด่นที่สุดของการใช้น้ำทั่วโลก จึงคาดว่าความต้องการอาหารและน้ำ
การบริโภคจะเพิ่มขึ้นอย่างมากในอนาคตอันใกล้ นอกจากนี้ การใช้ปุ๋ยและยาฆ่าแมลงที่เพิ่มขึ้น
ควบคู่ไปกับกิจกรรมการทำฟาร์มที่เข้มข้นขึ้นอาจนำไปสู่ความท้าทายด้านสิ่งแวดล้อมในอนาคต ในทำนองเดียวกันที่ดินทำกินมีจำกัดและ
จำนวนเกษตรกรทั่วโลกลดลง ความท้าทายเหล่านี้เน้นย้ำถึงความจำเป็นในการแก้ปัญหาการทำฟาร์มแบบยั่งยืนและสร้างสรรค์ (Elijah
et al., 2018; Friha et al., 2021; อิโนอุเอะ 2020; Tzounis et al., 2017)
การรวมเอาเทคโนโลยีใหม่ๆ เข้าไว้ด้วยกันได้รับการระบุว่าเป็นทางออกที่ดีในการจัดการกับความท้าทายเหล่านี้ การทำฟาร์มอัจฉริยะ (Brewster et al.,
2017; Tang et al., 2021) และเกษตรกรรมแม่นยำ (Feng et al., 2019; Khanna & Kaur, 2019) เป็นผลมาจากการถกเถียงดังกล่าว เดอะ
อดีตเป็นแนวคิดทั่วไปสำหรับการนำเทคโนโลยีการสื่อสารข้อมูล (ICT) และนวัตกรรมล้ำสมัยอื่นๆ มาใช้ในกิจกรรมการทำฟาร์มเพื่อเพิ่มประสิทธิภาพและประสิทธิผล (Haque et al., 2021) หลังมุ่งเน้นไปที่การจัดการเฉพาะพื้นที่ซึ่งที่ดินแบ่งออกเป็น
ชิ้นส่วนที่เป็นเนื้อเดียวกัน และแต่ละส่วนได้รับปริมาณที่แน่นอนของปัจจัยการผลิตทางการเกษตรสำหรับการเพิ่มผลผลิตพืชผลโดยใช้เทคโนโลยีใหม่ (Feng et al., 2019; Khanna & Kaur, 2019) เทคโนโลยีเด่นที่ดึงดูดความสนใจของนักวิชาการในสาขานี้ ได้แก่ Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Internet of Things (IoT) (Gill et al., 2017; He et al., 2021; Liu et al., 2019),
เทคนิคปัญญาประดิษฐ์ (AI) รวมถึงการเรียนรู้ของเครื่องและการเรียนรู้เชิงลึก (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), เทคโนโลยีคอมพิวเตอร์ (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), ข้อมูลขนาดใหญ่ (Gill et al., 2017; Tantalaki
et al., 2019) และ blockchain (PW Khan et al., 2020; Pincheira et al., 2021)
นอกจากเทคโนโลยีที่กล่าวถึงข้างต้นแล้ว การสำรวจระยะไกลยังได้รับการพิจารณาว่าเป็นเครื่องมือทางเทคโนโลยีที่มีศักยภาพสูงในการปรับปรุง
การเกษตรที่ชาญฉลาดและแม่นยำ ดาวเทียม เครื่องบินไร้คนขับ และโดรนเป็นเทคโนโลยีการสำรวจระยะไกลที่ได้รับความนิยม (Tsouros et al., 2019)
โดรน หรือที่รู้จักกันอย่างแพร่หลายในชื่อ Unmanned Aerial Vehicles (UAVs), Unmanned Aircraft Systems (UAS) และเครื่องบินขับไล่ระยะไกล
มีความสำคัญอย่างยิ่งเนื่องจากมีข้อดีหลายประการเมื่อเปรียบเทียบกับเทคโนโลยีการสำรวจระยะไกลอื่นๆ เช่น โดรนสามารถส่งของได้
ภาพคุณภาพสูงและความละเอียดสูงในวันที่มีเมฆมาก (Manfreda et al., 2018) นอกจากนี้ ความพร้อมในการใช้งานและความเร็วในการโอนข้อมูลยังเป็นปัจจัยอื่นๆ
ผลประโยชน์ (Radoglou-Grammatikis et al., 2020) เมื่อเปรียบเทียบกับเครื่องบิน โดรนนั้นประหยัดค่าใช้จ่ายสูงและติดตั้งและบำรุงรักษาได้ง่าย (Tsouros et al., 2019) แม้ว่าในตอนแรกจะใช้เพื่อวัตถุประสงค์ทางการทหารเป็นหลัก แต่โดรนก็มีประโยชน์ต่อการใช้งานพลเรือนมากมาย เช่น ในการจัดการห่วงโซ่อุปทาน (A. Rejeb, Rejeb, et al., 2021a) เพื่อวัตถุประสงค์ด้านมนุษยธรรม (A. Rejeb, Rejeb, et al., 2021c), การเกษตรอัจฉริยะ, การสำรวจและทำแผนที่, เอกสารมรดกทางวัฒนธรรม, การจัดการภัยพิบัติ และการอนุรักษ์ป่าไม้และสัตว์ป่า (Panday, Pratihast, et al., 2020) ในด้านการเกษตร พื้นที่ใช้งานของโดรนมีอยู่มากมาย เนื่องจากสามารถรวมเข้ากับเทคโนโลยีใหม่ๆ ความสามารถในการคำนวณ และเซ็นเซอร์ในตัวเพื่อสนับสนุนการจัดการพืชผล (เช่น การทำแผนที่ การตรวจสอบ การชลประทาน การวินิจฉัยพืช) (H. Huang et al., 2021) , การลดภัยพิบัติ, ระบบเตือนภัยล่วงหน้า, การอนุรักษ์สัตว์ป่าและป่าไม้ เป็นต้น (Negash et al., 2019) ในทำนองเดียวกัน โดรนสามารถใช้ประโยชน์จากกิจกรรมการเกษตรหลายอย่าง รวมถึงการตรวจสอบพืชผลและการเจริญเติบโต การประเมินผลผลิต การประเมินความเครียดของน้ำ และการตรวจหาวัชพืช แมลงศัตรูพืช และโรค (Inoue, 2020; Panday, Pratihast, et al., 2020) โดรนไม่เพียงสามารถใช้เพื่อวัตถุประสงค์ในการตรวจสอบ ประเมิน และตรวจจับตามข้อมูลทางประสาทสัมผัสเท่านั้น แต่ยังสามารถใช้เพื่อการชลประทานที่แม่นยำและการจัดการวัชพืช แมลงศัตรูพืช และโรคได้อย่างแม่นยำอีกด้วย กล่าวอีกนัยหนึ่ง โดรนสามารถฉีดพ่นน้ำและยาฆ่าแมลงในปริมาณที่แม่นยำตามข้อมูลด้านสิ่งแวดล้อม ประโยชน์ของโดรนในด้านการเกษตรสรุปไว้ในตารางที่ 1
ประโยชน์หลักของโดรนในด้านการเกษตร
| ประโยชน์ | ข้อมูลอ้างอิง |
| ปรับปรุงชั่วคราวและเชิงพื้นที่ สัมผัสความละเอียด | (Gago et al., 2015; Niu et al., 2020; Srivastava et al., 2020) |
| อำนวยความสะดวกให้กับเกษตรแม่นยำ | (L. Deng et al., 2018; Kalischuk et al., 2019; ไมไมติเจียง และคณะ 2017) |
| การจำแนกประเภทและการสอดแนมของ พืช | (อิโนอุเอะ 2020; Kalischuk และคณะ 2019; โลเปซ- ´ กรานาโดส et al., 2016; ไมไมตีเจียง et al., 2017; เมลวิลล์ และคณะ, 2019; โมหะราณาและดุตตะ, 2016) |
| การใช้ปุ๋ย | (L. Deng และคณะ 2018; Guan และคณะ 2019) |
| ติดตามสถานการณ์ภัยแล้ง | (Fawcett และคณะ 2020; Panday, Pratihast และคณะ 2020; สุ et al., 2018) |
| การประมาณมวลชีวภาพ | (เบนดิก et al., 2014) |
| การประมาณผลผลิต | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al., 2020) |
| การลดภัยพิบัติ | (เนกาช และคณะ 2019) |
| การอนุรักษ์สัตว์ป่าและ การป่าไม้ | (เนกาช และคณะ 2019; Panday, Pratihast และคณะ 2020) |
| การประเมินความเครียดของน้ำ | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. จาง et al., 2019) |
| ศัตรูพืช วัชพืช และโรค การค้นพบ | (Gaˇsparovi´c et al., 2020; Inoue, 2020; J. Su, Liu, และคณะ 2018; X. Zhang และคณะ 2019) |
ในทางกลับกัน โดรนก็มีข้อจำกัดเช่นกัน การมีส่วนร่วมของนักบิน กำลังเครื่องยนต์ ความเสถียรและความน่าเชื่อถือ คุณภาพของเซ็นเซอร์เนื่องจากน้ำหนักบรรทุก
ข้อจำกัดด้านน้ำหนัก ค่าใช้จ่ายในการดำเนินการ และกฎระเบียบการบิน (C. Zhang & Kovacs, 2012) เราเปรียบเทียบข้อบกพร่อง
ของเทคโนโลยีการสำรวจระยะไกลแบบเคลื่อนที่ทั้งสามรายการในตารางที่ 2 เทคโนโลยีการสำรวจระยะไกลอื่นๆ เช่น เซ็นเซอร์ดิน อยู่นอกเหนือจุดเน้นของการศึกษานี้
ข้อบกพร่องของเทคโนโลยีการสำรวจระยะไกลแบบเคลื่อนที่ต่างๆ
| การสำรวจระยะไกล เทคโนโลยี | ข้อบกพร่อง | อ้างอิง |
| โดรน (UAV) | การมีส่วนร่วมของนักบิน รูปภาพ' คุณภาพ (เฉลี่ย); ค่าใช้จ่ายในการดำเนินการ (เฉลี่ย); ความมั่นคง ความคล่องแคล่ว และ ความน่าเชื่อถือ มาตรฐาน; กำลังเครื่องยนต์ พลังที่จำกัด แหล่งที่มา (อายุการใช้งานแบตเตอรี่ที่ยาวนาน); ระยะเวลาการบินที่จำกัด การชนกัน และการโจมตีทางไซเบอร์ ถูก จำกัด น้ำหนักบรรทุก; ชุดข้อมูลขนาดใหญ่ และการประมวลผลข้อมูลที่จำกัด ความสามารถ; ขาดระเบียบ; ขาดความชำนาญสูงเข้า อุปสรรคในการเข้าถึง โดรนเพื่อการเกษตร | (Bacco และคณะ 2018; ดาวาลิบี et al., 2020; ฮาร์ดิน & ฮาร์ดิน, 2010; ฮาร์ดิน & เจนเซ่น, 2011; Lagkas และคณะ, 2018; Laliberte et al., 2007; ลาลิแบร์เต & รังโก, 2011; แมนเฟรดา และคณะ 2018, 2018; Nebiker et al., 2008; ปุริ et al., 2017; เวลลูซามี และคณะ, 2022; ซี. จาง & โควัคส์, 2012) |
| ดาวเทียม | ความครอบคลุมของดาวเทียมเป็นระยะ ความละเอียดสเปกตรัมจำกัด ช่องโหว่ต่อปัญหาการมองเห็น (เช่น เมฆ); ความไม่พร้อม และความเร็วการถ่ายโอนต่ำ การวางแนวและขอบภาพมืด ส่งผลกระทบต่อข้อมูลเชิงพื้นที่ที่มีค่าใช้จ่ายสูง ของสะสม; ส่งข้อมูลช้า ถึงเวลาที่ผู้ใช้ปลายทาง | (Aboutalebi และคณะ 2019; Cen et al., 2019; เฉิน และคณะ 2019; นันเซนและเอลเลียต, 2016; ปันเดย์, พราทิฮัสต์, et al., 2020; สายวิเนธ et al., 2019) |
| เครื่องบิน | ค่าใช้จ่ายในการรับเลี้ยงบุตรบุญธรรมสูง การตั้งค่าที่ซับซ้อน ค่าบำรุงรักษา; ความไม่พร้อมของความน่าเชื่อถือ เครื่องบิน, เรขาคณิตของ ภาพ; ข้อมูลที่ไม่สม่ำเสมอ การเข้าซื้อกิจการ; ขาดความยืดหยุ่น อุบัติเหตุร้ายแรง ข้อมูลเซ็นเซอร์ การเปลี่ยนแปลงเนื่องจากการสั่นสะเทือน ปัญหาการอ้างอิงทางภูมิศาสตร์ | (อาร์มสตรอง et al., 2011; แอตกินสัน และคณะ 2018; Barbedo & Koenigkan, 2018; โควาเลฟ & โวโรชิโลวา 2020; ซูมาเลนเนน et al., 2013; ธรรมและคณะ, 2013) |
ในฐานะที่เป็นเทคโนโลยีแบบสหสาขาวิชาชีพและอเนกประสงค์ในด้านการเกษตร โดรนได้รับการตรวจสอบจากหลากหลายมุมมอง ตัวอย่างเช่น นักวิชาการได้ตรวจสอบการใช้งานโดรนในภาคการเกษตร (Kulbacki et al., 2018; Mogili & Deepak, 2018) การมีส่วนร่วมของพวกเขาในการเกษตรแม่นยำ (Puri et al., 2017; Tsouros et al., 2019) การเสริมซึ่งกันและกัน เทคโนโลยีล้ำสมัย (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018) และความเป็นไปได้ในการยกระดับความสามารถในการนำทางและการรับรู้ (Bareth et al. , 2015; Suomalainen et al., 2014). เนื่องจากการวิจัยเกี่ยวกับการใช้โดรนในการเกษตรเป็นที่แพร่หลาย (Khan et al., 2021)) จึงจำเป็นต้องสรุปเอกสารที่ยังหลงเหลืออยู่และเปิดเผยโครงสร้างทางปัญญาของโดเมน นอกจากนี้ ในฐานะสาขาเทคโนโลยีขั้นสูงที่มีการปรับปรุงอย่างต่อเนื่อง การทบทวนเชิงโครงสร้างจำเป็นต้องดำเนินการเพื่อสรุปวรรณกรรมที่ยังหลงเหลืออยู่เป็นระยะๆ และระบุช่องว่างการวิจัยที่สำคัญ ถึง
วันนี้มีบทวิจารณ์ไม่กี่เรื่องที่กล่าวถึงการใช้งานโดรนในภาคเกษตรกรรม ตัวอย่างเช่น Mogili และ Deepak (2018) ได้ทบทวนผลกระทบของโดรนในการเฝ้าติดตามพืชผลและการฉีดพ่นยาฆ่าแมลง Inoue (2020) ดำเนินการตรวจสอบการใช้ดาวเทียมและโดรนในการสำรวจระยะไกลในภาคการเกษตร ผู้เขียนสำรวจความท้าทายทางเทคโนโลยีของการนำสมาร์ทฟาร์มมิ่งมาใช้และการมีส่วนร่วมของดาวเทียมและโดรนตามกรณีศึกษาและแนวทางปฏิบัติที่ดีที่สุด Tsouros และคณะ (2019) สรุปโดรนประเภทต่างๆ และการใช้งานหลักในด้านการเกษตร โดยเน้นการเก็บข้อมูลและวิธีการประมวลผลต่างๆ ไม่นานมานี้ Aslan และคณะ (2022) ดำเนินการทบทวนการใช้งาน UAV ในกิจกรรมการเกษตรอย่างครอบคลุม และเน้นย้ำความเกี่ยวข้องของการแปลและทำแผนที่พร้อมๆ กันสำหรับ UAV ในเรือนกระจก ดิแอซ-กอนซาเลซ และคณะ (2022) ทบทวนการศึกษาล่าสุดเกี่ยวกับการผลิตผลผลิตพืชผลโดยใช้เทคนิคการเรียนรู้ของเครื่องและทางไกลที่แตกต่างกัน
ระบบรับความรู้สึก การค้นพบของพวกเขาระบุว่า UAVs มีประโยชน์ในการประมาณตัวบ่งชี้ดินและประสิทธิภาพดีกว่าระบบดาวเทียมในแง่ของความละเอียดเชิงพื้นที่ ความชั่วขณะของข้อมูล และความยืดหยุ่น บาซิริ และคณะ (2022) ทำการทบทวนแนวทางและวิธีการต่างๆ เพื่อเอาชนะความท้าทายในการวางแผนเส้นทางสำหรับ UAV แบบหลายใบพัดในบริบทของเกษตรกรรมแม่นยำ นอกจากนี้ Awais และคณะ (2022) สรุปการประยุกต์ใช้ข้อมูลการรับรู้ระยะไกล UAV ในพืชผลเพื่อประเมินสถานะของน้ำและจัดเตรียมการสังเคราะห์เชิงลึกของศักยภาพในอนาคตของการสำรวจระยะไกล UAV สำหรับการประยุกต์ใช้ความเครียดของเสีย ในที่สุด Aquilani และคณะ (2022) ทบทวนเทคโนโลยีการทำฟาร์มล่วงหน้าที่ใช้ในระบบปศุสัตว์บนทุ่งหญ้า และสรุปได้ว่าการสำรวจระยะไกลที่เปิดใช้งานโดย UAV นั้นมีประโยชน์สำหรับการประเมินมวลชีวภาพและการจัดการฝูงสัตว์
นอกจากนี้ มีรายงานความพยายามในการใช้ UAV ในการเฝ้าติดตาม ติดตาม และรวบรวมปศุสัตว์
แม้ว่าการทบทวนเหล่านี้จะให้ข้อมูลเชิงลึกใหม่และสำคัญ แต่ไม่พบการทบทวนที่ครอบคลุมและเป็นปัจจุบันโดยยึดตามบรรณานุกรมในเอกสาร ซึ่งนำเสนอช่องว่างความรู้ที่ชัดเจน ยิ่งไปกว่านั้น มีการระบุไว้ว่าเมื่อการผลิตทางวิชาการเติบโตขึ้นในขอบเขตทางวิทยาศาสตร์ นักวิจัยจึงจำเป็นอย่างยิ่งที่จะต้องใช้วิธีการทบทวนเชิงปริมาณเพื่อทำความเข้าใจโครงสร้างความรู้ของโดเมน (Rivera & Pizam, 2015) ในทำนองเดียวกัน Ferreira และคณะ (2014) แย้งว่าในขณะที่สาขาการวิจัยเติบโตขึ้นและมีความซับซ้อน นักวิชาการควรตั้งเป้าหมายที่จะทำความเข้าใจความรู้ที่สร้างขึ้นเป็นครั้งคราวและรวบรวมเพื่อเปิดเผยผลงานใหม่ จับประเพณีและแนวโน้มการวิจัย ระบุหัวข้อที่มีการศึกษา และเจาะลึกโครงสร้างความรู้ของ สาขาและทิศทางการวิจัยที่เป็นไปได้ ในขณะที่ Raparelli และ Bajocco (2019) ทำการวิเคราะห์บรรณานุกรมเพื่อตรวจสอบขอบเขตความรู้ของการใช้งานโดรนในการเกษตรและป่าไม้ การศึกษาของพวกเขาพิจารณาเฉพาะงานวิจัยทางวิชาการที่ตีพิมพ์ระหว่างปี 1995 และ 2017 ซึ่งไม่ได้สะท้อนถึงพลวัตของพื้นที่ที่เคลื่อนไหวอย่างรวดเร็วนี้ นอกจากนี้ ผู้เขียนไม่ได้พยายามระบุการมีส่วนร่วมที่มีอิทธิพลมากที่สุดในสาขานี้ จัดกลุ่มวรรณกรรม และประเมินโครงสร้างทางปัญญาโดยใช้การวิเคราะห์แบบอ้างอิงร่วม ด้วยเหตุนี้ จึงจำเป็นต้องสรุปวรรณกรรมเพื่อเปิดเผยประเด็นการวิจัย แนวโน้ม และฮอตสปอตในปัจจุบัน
เพื่อเติมเต็มช่องว่างความรู้นี้ เราใช้ประโยชน์จากวิธีการเชิงปริมาณและวิธีการทางบรรณานุกรมที่เข้มงวดเพื่อตรวจสอบสถานะปัจจุบันของการวิจัยที่จุดตัดระหว่างโดรนและเกษตรกรรม เราโต้แย้งว่าการศึกษาในปัจจุบันได้มีส่วนร่วมหลายอย่างในวรรณกรรมที่มีอยู่โดยการตรวจสอบเทคโนโลยีที่เกิดขึ้นใหม่ซึ่งมีความจำเป็นอย่างมากในด้านการเกษตร เนื่องจากมันมีศักยภาพอย่างมากในการเปลี่ยนแปลงหลายด้านในภาคส่วนนี้ ความจำเป็นในการวิเคราะห์บรรณานุกรมของโดรนเพื่อการเกษตรได้รับการรับรู้มากยิ่งขึ้นเนื่องจากความรู้ที่กระจัดกระจายและแยกส่วนเกี่ยวกับโดรนในบริบทการเกษตร ในทำนองเดียวกัน วรรณกรรมที่เกี่ยวข้องกับโดรนเพื่อการเกษตรจำเป็นต้องจัดกลุ่มอย่างเป็นระบบ โดยพิจารณาจากการศึกษาที่มีอิทธิพลมากที่สุดซึ่งสร้างรากฐานของสาขาการวิจัยนี้ ข้อดีในการวิเคราะห์ยังรวมถึงความชัดเจนของหัวข้อการวิจัยหลักที่แสดงในวรรณกรรม เมื่อพิจารณาถึงศักยภาพในการเปลี่ยนแปลงของเทคโนโลยี เราคาดว่าการวิเคราะห์เครือข่ายเชิงลึกจะให้ข้อมูลเชิงลึกที่แปลกใหม่โดยการพิจารณาผลงานที่มีอิทธิพลและเปิดเผยประเด็นที่เกี่ยวข้องกับศักยภาพของโดรนเพื่อการเกษตร
เราจึงมุ่งมั่นที่จะบรรลุวัตถุประสงค์การวิจัยดังต่อไปนี้:
- การระบุสิ่งพิมพ์ที่มีอิทธิพลซึ่งมีส่วนร่วมที่โดดเด่นในการใช้งานโดรนในด้านการเกษตร
- การจัดกลุ่มวรรณกรรม การระบุจุดโฟกัสของการวิจัย และการทำแผนที่ของการศึกษา 'โครงสร้างทางปัญญา' หลักตามความคล้ายคลึงกันเชิงความหมายโดยใช้การวิเคราะห์การอ้างอิงร่วม
- ความเข้าใจเกี่ยวกับวิวัฒนาการของการเชื่อมโยงและเครือข่ายการอ้างอิงในช่วงเวลาต่างๆ ของสิ่งพิมพ์ต่างๆ ในสาขา และการระบุทิศทางการวิจัยในอนาคตและหัวข้อที่น่าสนใจ
เอกสารส่วนที่เหลือมีโครงสร้างดังนี้ ส่วนที่ 2 สรุปวิธีการและขั้นตอนการรวบรวมข้อมูล ส่วนที่ 3 แสดงผลลัพธ์ของการวิเคราะห์ และส่วนที่ 4 อภิปรายผลการวิจัยและสรุปผลการวิจัย ความหมาย และทิศทางในอนาคต
ระเบียบวิธี
ในการศึกษาวิจัยปัจจุบันนี้ เราทำการวิเคราะห์บรรณานุกรมเพื่อสำรวจการใช้งานโดรนในการเกษตร วิธีการเชิงปริมาณนี้เผยให้เห็นโครงสร้างทางปัญญาของโดเมนความรู้ (Arora & Chakraborty, 2021) และสถานะปัจจุบัน ประเด็นร้อน และทิศทางการวิจัยในอนาคตที่สามารถตรวจสอบได้โดยใช้วิธีนี้ (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020) โดยทั่วไป การวิเคราะห์บรรณานุกรมจะตรวจสอบวรรณกรรมที่ยังหลงเหลืออยู่เพื่อสรุปและเปิดเผยรูปแบบที่ซ่อนอยู่ของการสื่อสารที่เป็นลายลักษณ์อักษรและวิวัฒนาการของระเบียบวินัยตามสถิติและวิธีการทางคณิตศาสตร์ และนำไปใช้กับชุดข้อมูลขนาดใหญ่ (Pritchard, 1969; Small, 1999; Tahai & Rigsby , 1998). ด้วยการใช้บรรณานุกรม เราปรารถนาที่จะเข้าใจกระบวนทัศน์ที่มีอยู่ให้ดีขึ้นและจุดโฟกัสการวิจัยที่สนับสนุนโดเมนตามความคล้ายคลึงกัน (Thelwall, 2008) Bibliometrics ให้ข้อมูลเชิงลึกใหม่ที่ได้รับการสนับสนุนจากจุดแข็งเชิงปริมาณตามวัตถุประสงค์ของวิธีการ (Casillas & Acedo, 2007) ก่อนหน้านี้ นักวิชาการจำนวนมากได้ทำการศึกษาบรรณานุกรมในโดเมนที่เกี่ยวข้อง รวมถึงการเกษตร การสำรวจระยะไกล และการเปลี่ยนแปลงทางดิจิทัล (Armenta-Medina et al., 2020; Bouzembrak et al., 2019; A. Rejeb, Treiblmaier, et al., 2021; Wamba & Queiroz, 2021; Wang et al., 2019)
การวิเคราะห์การอ้างอิง
การวิเคราะห์การอ้างอิงเผยให้เห็นข้อมูลเชิงลึกที่หลากหลายในสาขาการวิจัยที่กำหนด ประการแรก ช่วยเปิดเผยผู้แต่งและสิ่งพิมพ์ที่มีอิทธิพลมากที่สุดซึ่งมีส่วนร่วมในสาขาการวิจัยที่กำหนดและสร้างผลกระทบอย่างมีนัยสำคัญ (Gundolf & Filser, 2013) ประการที่สอง การไหลของความรู้และการเชื่อมโยงการสื่อสารระหว่างผู้เขียนสามารถเปิดเผยได้ ในที่สุด โดยการติดตามความเชื่อมโยงระหว่างงานที่ถูกอ้างถึงและงานอ้างอิง เราสามารถสำรวจการเปลี่ยนแปลงและวิวัฒนาการของโดเมนความรู้เมื่อเวลาผ่านไป (Pournader
et al., 2020) จำนวนการอ้างอิงสูงของสิ่งพิมพ์สะท้อนให้เห็นถึงความเกี่ยวข้องและการมีส่วนร่วมอย่างมากในโดเมนการวิจัย (Baldi, 1998; Gundolf & Filser, 2013; Marinko, 1998) การวิเคราะห์การอ้างอิงสิ่งพิมพ์ยังช่วยระบุงานที่เกี่ยวข้องและติดตามความนิยมและความคืบหน้าเมื่อเวลาผ่านไป
การวิเคราะห์เอกสารอ้างอิงร่วม
การวิเคราะห์การอ้างอิงร่วมเป็นวิธีการที่มีคุณค่าในการสำรวจความสัมพันธ์ระหว่างสิ่งพิมพ์และอธิบายโครงสร้างทางปัญญาของสาขาวิชา (Nerur et al., 2008) กล่าวอีกนัยหนึ่ง โดยการระบุสิ่งตีพิมพ์ที่ถูกอ้างถึงมากที่สุดและความเชื่อมโยง วิธีการจัดกลุ่มสิ่งตีพิมพ์เป็นกลุ่มงานวิจัยที่แตกต่างกัน ซึ่งสิ่งตีพิมพ์ในกลุ่มมักจะแบ่งปันแนวคิดที่คล้ายคลึงกัน (McCain, 1990; Small, 1973) สิ่งสำคัญคือต้องระบุว่าความคล้ายคลึงกันไม่ได้หมายความว่าผลการค้นพบของสิ่งพิมพ์นั้นเหมือนกัน
เหนียวแน่นและเห็นพ้องต้องกัน; สิ่งพิมพ์อยู่ในกลุ่มเดียวกันเนื่องจากความคล้ายคลึงกันของหัวข้อ แต่อาจมีมุมมองที่ขัดแย้งกัน
การรวบรวมและวิเคราะห์ข้อมูล
ตามวิธีการที่เสนอโดย White and Griffith (1981) เราได้ค้นหาบทความในวารสารอย่างครอบคลุมเพื่อให้ครอบคลุมโดเมนการวิจัยทั้งหมดของการใช้งานโดรนในการเกษตร โดยดำเนินการห้าขั้นตอนต่อไปนี้:
- ขั้นตอนแรกคือการรวบรวมข้อมูล Scopus ได้รับเลือกให้เป็นหนึ่งในฐานข้อมูลที่ครอบคลุมและน่าเชื่อถือที่สุดพร้อมผลลัพธ์ที่เป็นมาตรฐาน ข้อมูลเมตาของสิ่งพิมพ์ที่เกี่ยวข้องกับการใช้งานโดรนในภาคการเกษตรทั้งหมดถูกเรียกค้นแล้ว จากนั้นเราก็วิเคราะห์บทความที่เลือก โดยลบบทความนอกประเด็นออกจากการวิเคราะห์
- เราวิเคราะห์วรรณกรรมและระบุคำหลักที่สำคัญที่สุดที่ใช้ในพื้นที่การวิจัย
- เมื่อใช้การวิเคราะห์การอ้างอิง เราสำรวจความเชื่อมโยงระหว่างผู้แต่งและเอกสารเพื่อเปิดเผยรูปแบบการอ้างอิงพื้นฐาน นอกจากนี้ เรายังระบุผู้แต่งและสิ่งพิมพ์ที่มีอิทธิพลมากที่สุดที่มีส่วนสำคัญในด้านโดรนเพื่อการเกษตร
- เราทำการวิเคราะห์การอ้างอิงร่วมเพื่อจัดกลุ่มสิ่งพิมพ์ที่คล้ายกันเป็นกลุ่มๆ
- สุดท้าย เราวิเคราะห์ความเชื่อมโยงและความเชื่อมโยงระหว่างประเทศ สถาบัน และวารสารเพื่ออธิบายถึงเครือข่ายความร่วมมือ
การระบุข้อความค้นหาที่เหมาะสม
เราใช้สตริงการค้นหาต่อไปนี้สำหรับการรวบรวมข้อมูล: (โดรน* หรือ “อากาศยานไร้คนขับ” หรือ uav* หรือ “ระบบอากาศยานไร้คนขับ” หรือ uas หรือ “เครื่องบินขับระยะไกล”) และ (เกษตรกรรมหรือเกษตรกรรมหรือเกษตรกรรมหรือชาวนา). การค้นหาดำเนินการในเดือนกันยายน 2021 โดรนมีหลายชื่อ รวมถึง UAV, UAS และเครื่องบินขับระยะไกล (Sah et al., 2021) คำค้นหาเฉพาะที่เกี่ยวข้องกับการเกษตรได้รับการระบุจากการศึกษาของ Abdollahi และคณะ (2021). เพื่อความชัดเจนและความโปร่งใส ข้อความค้นหาที่เราใช้มีระบุไว้ในภาคผนวก 1 หลังจากผ่านกระบวนการล้างข้อมูลแล้ว เราได้สร้างไฟล์ข้อความที่โหลดลงใน BibExcel ซึ่งเป็นเครื่องมือทั่วไปสำหรับการวิเคราะห์การอ้างอิงและการอ้างอิงร่วมกัน เครื่องมือนี้ยังให้การโต้ตอบที่ง่ายดายกับซอฟต์แวร์อื่นๆ และมอบอิสระในระดับที่สำคัญในการจัดการและวิเคราะห์ข้อมูล VOSviewer เวอร์ชัน 1.6.16 ถูกใช้เพื่อแสดงภาพผลลัพธ์และสร้างเครือข่ายบรรณานุกรม (Eck & Waltman, 2009) VOSviewer นำเสนอการแสดงภาพที่ใช้งานง่าย โดยเฉพาะอย่างยิ่งสำหรับการวิเคราะห์แผนที่บรรณานุกรม (Geng et al., 2020) นอกจากนี้ยังช่วยในการให้ผลลัพธ์ที่มองเห็นได้ชัดเจนซึ่งช่วยให้เข้าใจผลลัพธ์ได้ดีขึ้น (Abdollahi et al., 2021) การใช้สตริงการค้นหาตามที่ระบุไว้ข้างต้น เรารวบรวมและจัดเก็บสิ่งตีพิมพ์ที่เกี่ยวข้องทั้งหมด ผลการค้นหาแรกพบเอกสารทั้งหมด 5,085 รายการ เพื่อให้มั่นใจถึงคุณภาพของตัวอย่างที่เลือก เฉพาะบทความในวารสารที่ผ่านการตรวจสอบโดยเพื่อนเท่านั้นที่ได้รับการพิจารณาในงานวิจัย ส่งผลให้ไม่รวมเอกสารประเภทอื่นๆ เช่น หนังสือ บท เอกสารประกอบการประชุม และบันทึกบรรณาธิการ ในระหว่างกระบวนการคัดกรอง สิ่งที่ไม่เกี่ยวข้อง (เช่น นอกเหนือขอบเขตของงานนี้) สิ่งที่ซ้ำซ้อน (เช่น สิ่งที่ซ้ำซ้อนจากการจัดทำดัชนีสองครั้ง) และสิ่งพิมพ์ที่ไม่พูดภาษาอังกฤษจะถูกกรองออก กระบวนการนี้ส่งผลให้มีการรวมเอกสาร 4,700 ฉบับในการวิเคราะห์ขั้นสุดท้าย
การค้นพบและการอภิปราย
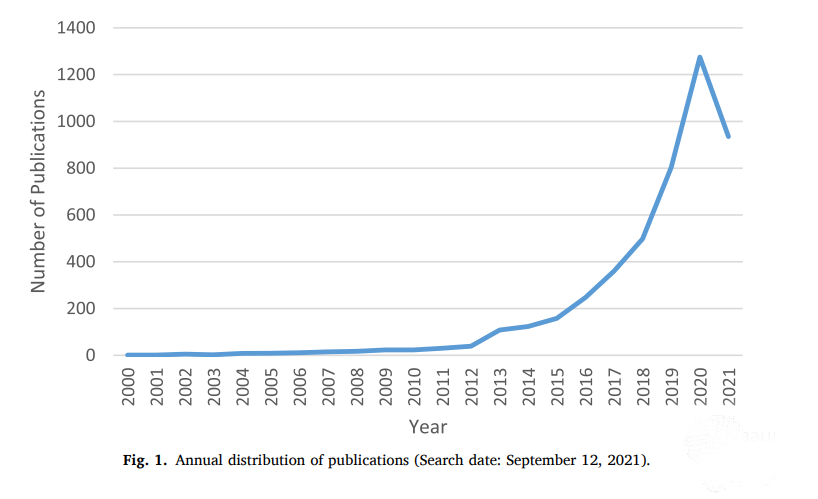
ในการเริ่มต้น เราได้วิเคราะห์พัฒนาการของผลงานสิ่งพิมพ์ในวรรณกรรมปัจจุบันเกี่ยวกับโดรนเพื่อการเกษตร การกระจายชั่วคราวของงานวิจัยเชิงวิชาการแสดงในรูปที่ 1 เราเห็นการเพิ่มขึ้นอย่างรวดเร็วของสิ่งพิมพ์ตั้งแต่ปี 2011 (30 สิ่งพิมพ์) เป็นต้นไป; ดังนั้นเราจึงตัดสินใจแบ่งช่วงเวลาการวิเคราะห์ออกเป็นสองช่วง เราเรียกช่วงเวลาระหว่างปี 1990 ถึง 2010 ว่าเป็นช่วงของการก่อร่างสร้างตัว ซึ่งมีการเผยแพร่เอกสารประมาณเจ็ดฉบับต่อปี ช่วงหลังปี 2010 ถูกเรียกว่าช่วงการเติบโตเนื่องจากการวิจัยเกี่ยวกับการใช้งานโดรนในการเกษตรพบว่าเพิ่มขึ้นอย่างทวีคูณในช่วงเวลานี้ หลังจากปี 2010 สิ่งพิมพ์จำนวนมากขึ้นยืนยันถึงความสนใจที่เพิ่มขึ้นในหมู่นักวิจัย ซึ่งสะท้อนให้เห็นว่ามีการใช้โดรนกับการสำรวจระยะไกลและใช้ในการเกษตรแม่นยำ (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020 ). โดยเฉพาะอย่างยิ่ง จำนวนสิ่งพิมพ์เพิ่มขึ้นจาก 108 ชิ้นในปี 2013 เป็น 498 ชิ้นในปี 2018 และสูงสุดที่ 1,275 ชิ้นในปี 2020 มีการเผยแพร่บทความทั้งหมด 935 ชิ้นระหว่างเดือนมกราคมถึงกลางเดือนกันยายน 2021 ต่อจากนั้น เราเลือกที่จะเน้นการวิเคราะห์ของเรามากขึ้นในขั้นตอนการเติบโต เนื่องจากช่วงเวลานี้สะท้อนให้เห็นถึงรายละเอียดปลีกย่อยที่สำคัญที่สุดของโดรนเพื่อการเกษตร
การวิเคราะห์คีย์เวิร์ด
คำหลักที่ผู้เขียนเลือกสำหรับสิ่งพิมพ์มีผลกระทบที่สำคัญต่อวิธีการนำเสนอบทความและวิธีการสื่อสารภายในชุมชนวิทยาศาสตร์ พวกเขาระบุประเด็นสำคัญของการวิจัยและกำหนดศักยภาพที่จะรุ่งเรืองหรือล้มเหลว (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015) การวิเคราะห์คำหลัก ซึ่งเป็นเครื่องมือในการเปิดเผยแนวโน้มและทิศทางการวิจัยที่กว้างขึ้น หมายถึงการรวบรวมคำหลักของสิ่งตีพิมพ์ที่เกี่ยวข้องทั้งหมดในโดเมน (Dixit & Jakhar, 2021) ในการศึกษาปัจจุบัน เราแบ่งคำหลักโดยรวมออกเป็นสองชุด (เช่น จนถึงปี 2010 และ 2011–2021) เพื่อสำรวจหัวข้อที่ได้รับความนิยมสูงสุด ด้วยการทำเช่นนี้ เราสามารถติดตามคำหลักที่สำคัญในทั้งสองชุด และรับประกันว่าเราบันทึกข้อมูลที่จำเป็นทั้งหมด สำหรับแต่ละชุด คำหลักสิบอันดับแรกจะแสดงในตารางที่ 3 เรากำจัดความไม่สอดคล้องกันโดยการรวมคำหลักที่มีความหมายเหมือนกัน เช่น "drone" และ "drones" หรือในทำนองเดียวกัน "Internet of Things" และ "IoT"
ตารางที่ 3 แสดงให้เห็นว่า “อากาศยานไร้คนขับ” เป็นคำหลักที่ใช้บ่อยกว่าเมื่อเปรียบเทียบกับ “โดรน” และ “ระบบอากาศยานไร้คนขับ” ในทั้งสองช่วงเวลา นอกจากนี้ “การสำรวจระยะไกล” “การเกษตรแม่นยำ” และ “เกษตรกรรม” ยังได้รับการจัดอันดับสูงในทั้งสองช่วงเวลา ในช่วงแรก “เกษตรแม่นยำ” อยู่ในอันดับที่ XNUMX และอันดับที่ XNUMX ในช่วงที่สอง ซึ่งแสดงให้เห็นว่าโดรนมีความสำคัญมากขึ้นในการบรรลุผลสำเร็จในการเกษตรแม่นยำอย่างไร เนื่องจากพวกมันสามารถตรวจสอบได้
การตรวจจับและการประมาณทำได้เร็วกว่า ถูกกว่า และง่ายกว่าเมื่อเปรียบเทียบกับการสำรวจระยะไกลและระบบภาคพื้นดินอื่นๆ นอกจากนี้ยังสามารถฉีดพ่นในปริมาณที่แม่นยำ (เช่น น้ำหรือยาฆ่าแมลง) เมื่อจำเป็น (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020)
รายการคำหลักที่ใช้บ่อยที่สุด
อันดับ | 1990 2010- | จำนวน เหตุการณ์ที่เกิดขึ้น | 2011 2021- | จำนวน เหตุการณ์ที่เกิดขึ้น |
| 1 | อากาศยานไร้คนขับ พาหนะ | 28 | หมดกำลังใจ ยานพาหนะทางอากาศ | 1628 |
| 2 | การสำรวจระยะไกล | 7 | ความแม่นยำ เกษตรกรรม | 489 |
| 3 | เกษตรกรรม | 4 | การสำรวจระยะไกล | 399 |
| 4 | ขนมาทางอากาศ | 4 | เสียงหึ่งๆ | 374 |
| 5 | ความแม่นยำ เกษตรกรรม | 4 | หมดกำลังใจ ระบบเสาอากาศ | 271 |
| 6 | อากาศยานไร้คนขับ | 4 | เกษตรกรรม | 177 |
| 7 | ไฮเปอร์สเปกตรัม เซ็นเซอร์ | 3 | การเรียนรู้ลึก ๆ | 151 |
| 8 | ประสาทเทียม เครือข่าย | 2 | เครื่อง การเรียนรู้ | 149 |
| 9 | เที่ยวบินอิสระ | 2 | พืชผัก ดัชนี | 142 |
| 10 | กาแฟ | 2 | อินเทอร์เน็ตของ สถานที่ | 124 |
คุณสมบัติที่น่าสนใจอีกอย่างคือการมีเทคโนโลยีเสริม ในระยะแรก “ไฮเปอร์สเปกตรัมเซนเซอร์” และ “โครงข่ายประสาทเทียม” (ANN) เป็นหนึ่งในสิบคำหลัก การถ่ายภาพแบบไฮเปอร์สเปกตรัมปฏิวัติการถ่ายภาพแบบดั้งเดิมด้วยการเก็บภาพจำนวนมากที่ความยาวคลื่นต่างๆ ในการทำเช่นนั้น เซ็นเซอร์สามารถรวบรวมข้อมูลเชิงพื้นที่และสเปกตรัมที่ดีกว่าได้พร้อมๆ กัน เมื่อเปรียบเทียบกับการถ่ายภาพหลายสเปกตรัม สเปกโทรสโกปี และภาพ RGB (Adao ˜ et al.,
2017). การเกิดขึ้นของ “ANN” ในขั้นแรกและ “การเรียนรู้เชิงลึก” (DL) และ “การเรียนรู้ของเครื่อง” (ML) ในขั้นที่สอง หมายความว่างานตีพิมพ์ส่วนใหญ่มุ่งเน้นไปที่การตรวจสอบศักยภาพของเทคนิค AI สำหรับโดรน การเกษตรตาม แม้ว่าโดรนจะสามารถบินได้ด้วยตนเอง แต่ก็ยังต้องการการมีส่วนร่วมของนักบิน ซึ่งแสดงถึงความฉลาดของอุปกรณ์ในระดับต่ำ อย่างไรก็ตาม ปัญหานี้สามารถแก้ไขได้เนื่องจากความก้าวหน้าของเทคนิค AI ซึ่งสามารถให้การรับรู้สถานการณ์ที่ดีขึ้นและสนับสนุนการตัดสินใจโดยอิสระ เมื่อติดตั้ง AI โดรนจะสามารถหลีกเลี่ยงการชนระหว่างการนำทาง ปรับปรุงการจัดการดินและพืชผล (Inoue, 2020) และลดแรงงานและความเครียดสำหรับมนุษย์ (BK Sharma et al., 2019)
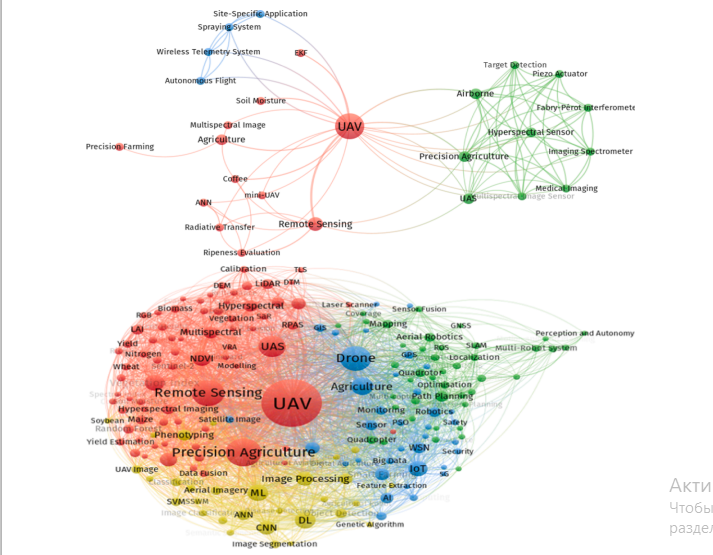
เนื่องจากความยืดหยุ่นและความสามารถในการจัดการข้อมูลแบบไม่เชิงเส้นจำนวนมหาศาล เทคนิค AI จึงเป็นวิธีการที่เหมาะสมในการวิเคราะห์ข้อมูลที่ส่งโดยโดรนและระบบการสำรวจระยะไกลอื่นๆ และระบบภาคพื้นดินเพื่อการทำนายและตัดสินใจ (Ali et al., 2015; อิโนะอุเอะ, 2020). นอกจากนี้ การปรากฏตัวของ “IoT” ในช่วงที่สองบ่งชี้ถึงบทบาทที่เกิดขึ้นใหม่ในด้านการเกษตร IoT กำลังปฏิวัติการเกษตรด้วยการเชื่อมต่อระหว่างเทคโนโลยีอื่นๆ รวมถึงโดรน, ML, DL, WSN และข้อมูลขนาดใหญ่ ประโยชน์หลักประการหนึ่งของการนำ IoT ไปใช้คือความสามารถในการรวมงานต่างๆ อย่างมีประสิทธิภาพและประสิทธิผล (การรับข้อมูล การวิเคราะห์และประมวลผลข้อมูล การตัดสินใจ และการนำไปใช้งาน) ในแบบเรียลไทม์ (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). นอกจากนี้ โดรนยังถือเป็นเครื่องมือที่มีประสิทธิภาพในการเก็บข้อมูลที่จำเป็นสำหรับการคำนวณความแข็งแรงของพืชและคุณสมบัติของพืช (Candiago et al., 2015) รูปที่ 2a และ 2b แสดงคำหลักเครือข่ายที่เกิดขึ้นร่วมกันสำหรับทั้งสองช่วงเวลา
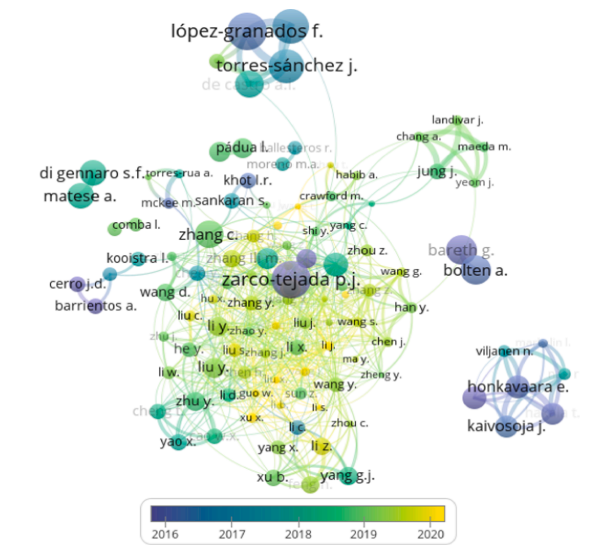
ผู้เขียนที่มีอิทธิพล
ในส่วนนี้ เราจะพิจารณาผู้เขียนที่มีอิทธิพลและตรวจสอบว่าเครือข่ายการอ้างอิงของผู้เขียนสามารถแสดงภาพและจัดระเบียบวรรณกรรมปัจจุบันได้อย่างไร รูปที่ 3 แสดงการซ้อนทับตามลำดับเวลาของนักวิจัยทั้งหมดที่มีจำนวนการอ้างอิงสูงสุด ระดับสีสะท้อนถึงรูปแบบการอ้างอิงของผู้แต่งทั้งปี เราตรวจสอบโครงสร้างการอ้างอิงของนักวิจัยที่ตีพิมพ์ผลการศึกษาเกี่ยวกับโดรนเพื่อการเกษตรโดยใช้เกณฑ์การอ้างอิงขั้นต่ำ 50 รายการและสิ่งพิมพ์ XNUMX ฉบับ ออกจาก
ผู้เขียน 12,891 คน มีเพียง 115 คนเท่านั้นที่เข้าเงื่อนไขนี้ ตารางที่ 4 แสดงรายชื่อผู้เขียนที่มีอิทธิพลสูงสุด 1,963 อันดับแรก โดยเรียงตามจำนวนการอ้างอิงสูงสุด Lopez- Granados F. นำรายชื่อด้วยการอ้างอิง 1,909 ครั้ง ตามมาด้วย Zarco-Tejada PJ ที่มีการอ้างอิง XNUMX ครั้ง
รายชื่อผู้แต่งที่ถูกอ้างถึงมากที่สุด
| อันดับ | ผู้เขียน | Citations |
| 1 | โลเปซ-กรานาโดส ´ เอฟ. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | พีน่า ~ JM | 1,644 |
| 4 | ตอร์เรส-เอส อันเชซ เจ | 1,576 |
| 5 | เฟเรเรส อี | 1,339 |
| 6 | เรมอนดิโน เอฟ | 1,235 |
| 7 | โบลเทน เอ | 1,160 |
| 8 | บาเร็ธ จี | 1,155 |
| 9 | เบอร์นี เจ | 1,132 |
| 10 | เด คาสโตร เอไอ | 1,036 |
เมื่อพูดถึงสิ่งพิมพ์แต่ละฉบับ บทความของ Zhang และ Kovacs (2012) ได้รับการอ้างถึงมากที่สุดในการศึกษาที่ตีพิมพ์ใน Precision Agriculture ในที่นี้ ผู้เขียนได้ทบทวนการประยุกต์ใช้ UAS ในการเกษตรแบบแม่นยำ ผลการวิจัยของพวกเขาชี้ให้เห็นว่ามีความจำเป็นในการพัฒนาการออกแบบแพลตฟอร์ม การผลิต มาตรฐานของการอ้างอิงทางภูมิศาสตร์ด้วยรูปภาพ และเวิร์กโฟลว์การดึงข้อมูลเพื่อให้เกษตรกรได้รับผลิตภัณฑ์ขั้นสุดท้ายที่เชื่อถือได้ นอกจากนี้ พวกเขายังแนะนำให้เกษตรกรมีส่วนร่วมมากขึ้น โดยเฉพาะอย่างยิ่งในการวางแผนภาคสนาม การจับภาพ ตลอดจนการตีความและการวิเคราะห์ข้อมูล ที่สำคัญ การศึกษานี้เป็นหนึ่งในกลุ่มแรกๆ ที่แสดงให้เห็นถึงความสำคัญของ UAV ในการทำแผนที่ภาคสนาม การทำแผนที่ความแข็งแรง การวัดปริมาณสารเคมี การตรวจสอบความเครียดของพืช และการประเมินผลของปุ๋ยที่มีต่อการเจริญเติบโตของพืช ความท้าทายที่เกี่ยวข้องกับเทคโนโลยียังรวมถึงต้นทุนที่ห้ามปราม ความสามารถของเซ็นเซอร์ ความเสถียรและความน่าเชื่อถือของแพลตฟอร์ม การขาดมาตรฐาน และขั้นตอนที่สอดคล้องกันในการวิเคราะห์ข้อมูลจำนวนมหาศาล
การวิเคราะห์การอ้างอิง
การวิเคราะห์การอ้างอิงแสดงถึงการศึกษาอิทธิพลของบทความ แม้ว่ามักจะเป็นไปตามกระแส (เช่น อคติการอ้างอิง การอ้างอิงตัวเอง) ถือว่าเป็นหนึ่งในเครื่องมือมาตรฐานสำหรับการประเมินผลกระทบ (Osareh, 1996; A. Rejeb et al., 2022; สรลี และคณะ, 2010) การอ้างอิงยังสะท้อนถึงความสำคัญและความมีชีวิตชีวาของการมีส่วนร่วมของบทความต่อวรรณกรรมในหัวข้อเฉพาะ (R. Sharma et al., 2022) เราทำการวิเคราะห์การอ้างอิงเพื่อพิจารณาการศึกษาที่มีอิทธิพลมากที่สุดเกี่ยวกับโดรนเพื่อการเกษตรและสรุปเนื้อหา ตารางที่ 5 แสดงรายการเอกสารที่มีอิทธิพลมากที่สุด 1990 ฉบับในช่วงปี 2010-2011 และ 2021-2009 บทความโดย Berni et al. (2010)b และ Austin (1990) ได้รับการอ้างถึงมากที่สุดในช่วงปี 2010 และ 831 โดยมีการอ้างอิง 498 และ 2009 ครั้งตามลำดับ เบอร์นีและคณะ (2009)b แสดงให้เห็นถึงศักยภาพในการพัฒนาผลิตภัณฑ์การสำรวจระยะไกลเชิงปริมาณผ่าน UAV ที่ใช้เฮลิคอปเตอร์ซึ่งติดตั้งเซ็นเซอร์ภาพหลายสเปกตรัมแบบหลายสเปกตรัมแบบใช้ความร้อนและแถบแคบ เมื่อเปรียบเทียบกับเซ็นเซอร์ตรวจจับทางอากาศแบบบรรจุคนแบบดั้งเดิม ระบบ UAV ที่มีต้นทุนต่ำสำหรับการเกษตรสามารถบรรลุการประมาณค่าพารามิเตอร์ทางชีวฟิสิกส์ของพืชผลที่เทียบเคียงได้ หากไม่ดีกว่า ต้นทุนที่ไม่แพงและความยืดหยุ่นในการดำเนินงาน ควบคู่ไปกับความละเอียดเชิงสเปกตรัม เชิงพื้นที่ และเชิงเวลาสูงที่มีให้ในเวลาตอบสนองที่รวดเร็ว ทำให้ UAVs เหมาะสำหรับการใช้งานประเภทต่างๆ ที่ต้องการการจัดการตามเวลาที่สำคัญ รวมถึงการจัดกำหนดการชลประทานและการทำฟาร์มที่แม่นยำ กระดาษจาก Berni และคณะ (2010)b ได้รับการอ้างถึงอย่างสูงเนื่องจากได้รวมแพลตฟอร์มปีกหมุนไร้คนขับและเซ็นเซอร์ดิจิตอลและความร้อนเข้ากับกลไกการสอบเทียบที่จำเป็นสำหรับการใช้งานด้านการเกษตรอย่างมีประสิทธิภาพ สิ่งพิมพ์ที่ได้รับการอ้างถึงมากที่สุดเป็นอันดับสองคือหนังสือที่เขียนโดย Austin (XNUMX) ซึ่งกล่าวถึง UAV จากมุมมองการออกแบบ การพัฒนา และการปรับใช้ ในภาคการเกษตร UAV สนับสนุนการตรวจติดตามพืชผลโดยตรวจหาโรคตั้งแต่เนิ่นๆ ผ่านการเปลี่ยนสีของพืชผล อำนวยความสะดวกในการหว่านและฉีดพ่นพืชผล ตลอดจนเฝ้าติดตามและต้อนฝูงสัตว์
การศึกษาของซัลลิแวนและคณะ (2007), Lumme และคณะ (2008) และ Gokto ¨ ǧan et al. (2010) จบรายการบทความที่มีการอ้างอิงมากที่สุดสิบห้าอันดับแรก บทความเหล่านี้แสดงให้เห็นถึงการพัฒนาระบบที่ใช้ UAV เพื่อสนับสนุนการเกษตร พวกเขานำเสนอวิธีแก้ปัญหาต่างๆ เช่น การตรวจสอบและการสแกนพืชผล การเฝ้าระวังและการจัดการวัชพืช และการสนับสนุนการตัดสินใจ พวกเขายังแนะนำและหารือเกี่ยวกับความสามารถของ UAV ในการเพิ่มประสิทธิภาพการสุ่มตัวอย่างและช่วยเหลือเกษตรกรในการวางแผนที่แม่นยำและมีประสิทธิภาพ
กลยุทธ์การปลูก เอกสาร 2009 ฉบับเขียนโดย Berni (Berni et al., 2009b; Berni et al., 2014a) โดยเน้นย้ำถึงผลกระทบที่สำคัญของเขาต่อการวิจัยที่เกี่ยวข้องกับโดรนทางการเกษตร กระดาษจาก Zarco-Tejada และคณะ (XNUMX) เป็นหนึ่งในการศึกษาที่บุกเบิกเพื่อแสดงให้เห็นถึงความจำเป็นในการใช้ภาพถ่าย UAV ต้นทุนต่ำในการวัดความสูงของต้นไม้
รายชื่อสิ่งพิมพ์ที่มีการอ้างอิงมากที่สุด
| อันดับ | จาก 1990 ไป 2010 | จาก 2011 ไป 2021 | ||
| เอกสาร | การอ้างอิง | เอกสาร | การอ้างอิง | |
| 1 | (เบอร์นีและคณะ, 2009b) | 831 | (ซี. จาง & โควัคส์, 2012) | 967 |
| 2 | (ออสติน, 2010) | 498 | (เน็กซ์ & เรมอนดิโน, 2014) | 893 |
| 3 | (ล่า et al., 2010) | 331 | (ฟลอเรอาโน่&วู้ด 2015) | 552 |
| 4 | (เอสอาร์ เฮอร์วิตซ์ และคณะ, 2004) | 285 | (ฮอสเซน มอทลากห์ และคณะ, 2016) | 391 |
| 5 | (CCD Lelong และคณะ, 2008) | 272 | (ชาคาเทรห์และคณะ, 2019) | 383 |
| 6 | (เบอร์นีและคณะ, 2009b) | 250 | (มา et al., 2017) | 373 |
| 7 | (เกรนซ์ดอร์ฟเฟอร์ ¨ et al., 2008) | 198 | (เบนดิก et al., 2014) | 360 |
| 8 | (ฮราบาร์ และคณะ 2005) | 175 | (Zarco-Tejada และคณะ, 2014) | 347 |
| 9 | (วาย. หวง และคณะ 2009) | 129 | (โฆษณา~ อ่าว et al., 2017) | 335 |
| 10 | (ชมาเล III และคณะ, 2008) | 119 | (ฮอนคาวาราและคณะ, 2013) | 331 |
| 11 | (อับดุล-เอลเราะห์มาน และคณะ, 2005) | 79 | (แคนดิอาโก et al., 2015) | 327 |
| 12 | (เทคชี่ และคณะ 2010) | 69 | (เซียง & เทียน, 2011) | 307 |
| 13 | (ซัลลิแวนและคณะ, 2007) | 51 | (มาเตสและคณะ, 2015) | 303 |
| 14 | (ลูมม์ และคณะ 2008) | 42 | (กาโก et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan และคณะ 2010) | 40 | (อาเซน และคณะ 2015a) | 269 |
ในช่วงที่สอง (2011–2021) งานวิจัยของ Zhang และ Kovacs (2012) และ Nex และ Remondino (2014) ส่งผลให้เกิดสิ่งพิมพ์ที่มีการอ้างอิงบ่อยที่สุด Zhang และ Kovacs (2012) ให้เหตุผลว่าการเกษตรแบบแม่นยำสามารถได้รับประโยชน์จากการใช้เทคนิคและเซ็นเซอร์เชิงพื้นที่ เช่น ระบบข้อมูลทางภูมิศาสตร์ GPS และการสำรวจระยะไกล เพื่อจับความผันแปรของพื้นที่และจัดการโดยใช้กลยุทธ์ทางเลือก ในฐานะผู้เปลี่ยนเกมในการเกษตรแบบแม่นยำ การนำโดรนมาใช้ได้ประกาศศักราชใหม่ในการสำรวจระยะไกล ทำให้การสังเกตการณ์ทางอากาศง่ายขึ้น บันทึกข้อมูลการเจริญเติบโตของพืช สภาพดิน และพื้นที่ฉีดพ่น การตรวจสอบของ Zhang และ Kovacs (2012) มีความสำคัญเนื่องจากนำเสนอข้อมูลเชิงลึกเกี่ยวกับ UAV โดยเปิดเผยการใช้งานที่มีอยู่และความท้าทายของอุปกรณ์เหล่านี้ในการตรวจสอบด้านสิ่งแวดล้อมและการเกษตรที่แม่นยำ เช่น ข้อจำกัดของแพลตฟอร์มและกล้อง ความท้าทายในการประมวลผลข้อมูล การมีส่วนร่วมของเกษตรกร และกฎระเบียบด้านการบิน . ที่สอง
การศึกษาที่ได้รับการอ้างถึงมากที่สุดจาก Nex และ Remondino (2014) ได้ทบทวนความทันสมัยของ UAV สำหรับการจับภาพ ประมวลผล และวิเคราะห์ภาพพื้นโลก
งานของพวกเขายังนำเสนอภาพรวมของแพลตฟอร์ม แอปพลิเคชัน และกรณีการใช้งาน UAV ต่างๆ ซึ่งแสดงให้เห็นถึงความก้าวหน้าใหม่ล่าสุดในการประมวลผลภาพ UAV ในภาคการเกษตร เกษตรกรสามารถใช้ UAV ในการตัดสินใจที่มีประสิทธิภาพเพื่อให้บรรลุผลในการประหยัดต้นทุนและเวลา ได้รับบันทึกความเสียหายอย่างรวดเร็วและแม่นยำ และคาดการณ์ปัญหาที่อาจเกิดขึ้นได้ ตรงกันข้ามกับแพลตฟอร์มทางอากาศทั่วไป UAV สามารถลดค่าใช้จ่ายในการปฏิบัติงานและลดความเสี่ยงในการเข้าถึงในสถานที่ที่ไม่เอื้ออำนวย ในขณะที่ยังคงรักษาศักยภาพที่มีความแม่นยำสูงไว้ได้ เอกสารของพวกเขาสรุปข้อดีต่างๆ ของ UAV โดยเฉพาะในแง่ของความแม่นยำและความละเอียด
ในบรรดาสิ่งตีพิมพ์ที่เหลืออีก 2011 ฉบับที่อ้างถึงมากที่สุดระหว่างปี 2021 ถึง 2014 เราสังเกตเห็นว่าการวิจัยที่เกี่ยวข้องกับการใช้งานโดรนในภารกิจการถ่ายภาพมีความเข้มข้นมากขึ้น (Bendig et al., 2017; Ma et al., 2014; Zarco-Tejada et al., 2015) , การเกษตรแบบแม่นยำ (Candiago et al., 2013; Honkavaara et al., 2015a), การปลูกองุ่นแบบแม่นยำ (Matese et al., 2015), การประเมินความเครียดของน้ำ (Gago et al., 2015) และการตรวจสอบพืชพรรณ (Aasen et al. , XNUMXก). ในช่วงปีแรก ๆ นักวิจัยมุ่งเน้น
เพิ่มเติมเกี่ยวกับการพัฒนาระบบที่ใช้ UAV ที่มีต้นทุนต่ำ น้ำหนักเบา และแม่นยำเพื่อการเกษตร การวิจัยล่าสุดได้มุ่งเน้นไปที่การทบทวนการใช้งาน UAV เพื่อการเกษตรและการสำรวจภาคสนามมากขึ้น โดยสรุป การวิเคราะห์นี้เผยให้เห็นว่าสิ่งพิมพ์ที่ทรงอิทธิพลส่วนใหญ่ได้จัดให้มีการทบทวนการศึกษาก่อนหน้านี้เพื่อประเมินสถานะทางวิทยาศาสตร์และเทคโนโลยีในปัจจุบันของ UAV และพัฒนาระบบ UAV เพื่อสนับสนุนการเกษตรแบบแม่นยำ น่าสนใจ เราไม่พบการศึกษาที่ใช้เชิงประจักษ์
วิธีการหรือกรณีศึกษาเชิงพรรณนา ซึ่งก่อให้เกิดช่องว่างความรู้ที่สำคัญ และเรียกร้องให้มีการวิจัยเพิ่มเติมเกี่ยวกับหัวข้อนี้
การวิเคราะห์การอ้างอิงร่วม
จากข้อมูลของ Gmür (2006) การวิเคราะห์การอ้างอิงร่วมจะระบุสิ่งตีพิมพ์และการจัดกลุ่มสิ่งตีพิมพ์ที่คล้ายกัน การตรวจสอบคลัสเตอร์อย่างระมัดระวังสามารถเปิดเผยสาขาการวิจัยทั่วไประหว่างสิ่งตีพิมพ์ เราตรวจสอบการอ้างอิงร่วมของวรรณกรรมที่เกี่ยวข้องกับโดรนเพื่อการเกษตรเพื่อแสดงหัวข้อที่เกี่ยวข้องและตรวจจับรูปแบบทางปัญญาของสิ่งพิมพ์ ในเรื่องนี้ Small (1973) แนะนำให้ใช้การวิเคราะห์ cocitation เพื่อศึกษางานวิจัยที่มีอิทธิพลและมีผลมากที่สุด
อยู่ในระเบียบวินัย ในการจำกัดการตั้งค่าไว้ที่บทความที่กระตุ้นความสนใจมากที่สุด (Goyal & Kumar, 2021) เรากำหนดเกณฑ์การอ้างอิงร่วมไว้ที่ 25 บทความ ซึ่งหมายความว่าบทความสองบทความต้องถูกอ้างถึงร่วมกันในรายการอ้างอิงของสิ่งพิมพ์ที่แตกต่างกัน 25 ฉบับหรือมากกว่า การจัดกลุ่มยังดำเนินการด้วยขนาดคลัสเตอร์ขั้นต่ำ 1 และไม่มีวิธีการใดๆ ในการรวมคลัสเตอร์ขนาดเล็กเข้ากับกลุ่มที่ใหญ่กว่า เป็นผลให้หกกลุ่มถูกสร้างขึ้นตามความคล้ายคลึงกันของการศึกษาและโครงสร้างทางปัญญาของพวกเขา ตารางที่ 6 แสดงการกระจายสิ่งพิมพ์ในแต่ละคลัสเตอร์
คลัสเตอร์ 1: คลัสเตอร์นี้มีเอกสาร 2018 ฉบับที่เผยแพร่หลังจากสิ่งพิมพ์ในคลัสเตอร์นี้กล่าวถึงบทบาทของโดรนในการสนับสนุนการตรวจสอบด้านสิ่งแวดล้อม การจัดการพืชผล และการจัดการวัชพืช ตัวอย่างเช่น Manfreda และคณะ (XNUMX) ให้ภาพรวมของการวิจัยปัจจุบันและการใช้งาน UAV ในการตรวจสอบระบบนิเวศเกษตรธรรมชาติ และยืนยันว่าเทคโนโลยีนี้มีศักยภาพมหาศาลในการเพิ่มประสิทธิภาพการตรวจสอบด้านสิ่งแวดล้อมอย่างมากและลด
ช่องว่างที่มีอยู่ระหว่างการสังเกตการณ์ภาคสนามกับการสำรวจระยะไกลทางอากาศและอวกาศแบบเดิม สิ่งนี้สามารถทำได้โดยนำเสนอความสามารถใหม่สำหรับการดึงข้อมูลชั่วคราวที่ดีขึ้นและข้อมูลเชิงลึกเชิงพื้นที่ในพื้นที่ขนาดใหญ่ด้วยวิธีที่เหมาะสม UAV สามารถรับรู้สภาพแวดล้อมอย่างต่อเนื่องและส่งข้อมูลผลลัพธ์ไปยังหน่วยงานอัจฉริยะที่รวมศูนย์/กระจายอำนาจ ซึ่งควบคุมเซ็นเซอร์เพื่อระบุปัญหาในที่สุด เช่น การขาดโรคหรือการตรวจจับน้ำ (Padua ´ et al., 2017) Adao ˜ et al. (2017) ระบุว่า UAVs เหมาะอย่างยิ่งสำหรับการประเมินสภาพของโรงงานโดยการเก็บข้อมูลดิบจำนวนมหาศาลที่เกี่ยวข้องกับสถานะของน้ำ การประมาณมวลชีวภาพ และการประเมินความแข็งแรง เซ็นเซอร์ที่ติดตั้ง UAV ยังสามารถใช้งานได้ทันทีในสภาพแวดล้อมที่เหมาะสมเพื่อให้สามารถเก็บข้อมูลการรับรู้จากระยะไกลได้ทันท่วงที (Von Bueren et al., 2015) ด้วย UAVs เกษตรกรสามารถดำเนินกิจกรรมการทำฟาร์มในร่มโดยรับการวัดจากสถานที่ใดก็ได้ในพื้นที่สามมิติของสภาพแวดล้อมการทำฟาร์มในร่ม (เช่น โรงเรือน) ดังนั้นจึงรับประกันการควบคุมสภาพอากาศในท้องถิ่นและการตรวจสอบพืช (Roldan ´ et al ., 2015). ในบริบทของความแม่นยำ
การเกษตร การตัดสินใจในการจัดการพืชผลจำเป็นต้องมีข้อมูลพืชผลที่ถูกต้องและเชื่อถือได้พร้อมความละเอียดทางเวลาและเชิงพื้นที่ที่เหมาะสม (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019) ด้วยเหตุนี้ Agüera Vega et al. (2015) ใช้ระบบเซ็นเซอร์หลายสเปกตรัมที่ติดตั้ง UAV เพื่อรับภาพดอกทานตะวันในช่วงฤดูปลูก ในทำนองเดียวกัน Huang et al. (2009) โปรดทราบว่าการสำรวจระยะไกลโดยใช้ UAV สามารถอำนวยความสะดวกในการวัดพืชผลและดินจากข้อมูลสเปกตรัมที่รวบรวมได้ เวอร์เจอร์และคณะ (2014) ได้พัฒนาและทดสอบเทคนิคในการประมาณค่าดัชนีพื้นที่สีเขียว (GAI) จากการวัดการสะท้อนแสงของ UAV ในการใช้งานด้านการเกษตรแบบแม่นยำ โดยเน้นที่ข้าวสาลีและพืชเรพซีด ดังนั้น โดรนจึงให้ความเป็นไปได้ใหม่ในการดึงข้อมูลสถานะพืชผลด้วยการตรวจซ้ำบ่อยครั้งและความละเอียดเชิงพื้นที่สูง (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016)
การรวมกลุ่มของสิ่งพิมพ์ที่มีอิทธิพลเกี่ยวกับโดรนเพื่อการเกษตร
| Cluster | ชุดรูปแบบกว้าง | อ้างอิง |
| 1 | การตรวจสอบสิ่งแวดล้อม การปลูกพืช การจัดการ, การจัดการวัชพืช | (โฆษณา~ อ่าว et al., 2017; อเกวร่า เวก้า และคณะ 2015; เดอคาสโตร และคณะ 2018; โกเมซ-แคนด์ ´ on ´ et al., 2014; YB Huang et al., 2013; คานาล และคณะ, 2017; โลเปซ-กรานาโดส, ´ 2011; Manfreda et al., 2018; พี' อาดัว และคณะ 2017; Pena ˜ et al., 2013; เปเรซ-ออร์ติซ et al., 2015; ราสมุสเซน และคณะ, 2013, 2016; ตอร์เรส-เอส อันเชซ et al., 2014; ตอร์เรส-ซานเชซ, ´ โลเปซ-กรานาโดส, ´ & พีน่า, ˜ 2015; Verger et al., 2014; วอน Bueren et al., 2015; ซี จาง & โควัคส์, 2012) |
| 2 | ฟีโนไทป์ระยะไกล ผลผลิต การประมาณค่า แบบจำลองพื้นผิวพืชผล การนับจำนวนพืช | (เบนดิก และคณะ 2013, 2014; Geipel et al., 2014; กนาดิงเงอร์ ¨ & ชมิดฮอลเตอร์, 2017; ฮัคไฮทัตลาบ et al., 2016; โฮลแมน และคณะ, 2016; จิน และคณะ 2017; ดับเบิลยู ลี และคณะ 2016; ไมไมตีเจียง et al., 2017; สันคาราน และคณะ 2015; เชิร์ร์มานน์ และคณะ 2016; ชิ et al., 2016; Yue et al., 2017; เอ็กซ์ โจว และคณะ 2017) |
| 3 | การถ่ายภาพความร้อนสำหรับน้ำ, การถ่ายภาพหลายสเปกตรัม | (Baluja et al., 2012; Berni et al., 2009ข; เบอร์นี et al., 2009a ; แคนดิอาโก et al., 2015; กาโก et al., 2015; กอนซาเลซ-ดูโก และคณะ 2013, 2014; Grenzdorffer ¨ et al., 2008; คาลิค et al., 2019; Matese และคณะ, 2015; ริเบโร-โกเมส et al., 2017; Santesteban et al., 2017; คุณโต et al., 2013) |
| 4 | การถ่ายภาพ Hypersectral, สเปกตรัม การถ่ายภาพ | (Aasen และคณะ 2015a; Bareth และคณะ 2015; ฮากาลา และคณะ, 2013; Honkavaara et al., 2013a; ลูเซียร์ et al., 2014; ซารี et al., 2011; ซูมาไลเนน และคณะ 2014) |
| 5 | แอปพลิเคชันการทำแผนที่ 3 มิติ | (Jim'enez-Brenes et al., 2017; Nex & เรมอนดิโน, 2014; Salami et al., 2014; ตอร์เรส-เอส อันเชซ, โลเปซ- ´ กรานาโดส เซอร์ราโน และคณะ 2015; ซาฮาวี และคณะ, 2015; ซาร์โก้-เตจาด้า et al., 2014) |
| 6 | การเฝ้าระวังด้านการเกษตร | (SR Herwitz et al., 2004; Hunt et al., 2010; CCD Lelong และคณะ, 2008; Primicerio et al., 2012; เซียง & เทียน, 2011) |
นอกจากนี้ โดรนยังมีประโยชน์สำหรับงานที่ท้าทายในภาคการเกษตร รวมถึงการทำแผนที่วัชพืช ภาพที่ถ่ายโดยอุปกรณ์ได้พิสูจน์แล้วว่ามีประโยชน์ในการตรวจหาวัชพืชในไร่นาตั้งแต่เนิ่นๆ (de Castro et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021) ในเรื่องนี้ เดอ คาสโตรและคณะ (2018) ระบุว่าการผสานรวมภาพ UAV และการวิเคราะห์ภาพตามวัตถุ (OBIA) ช่วยให้ผู้ปฏิบัติงานสามารถเอาชนะปัญหาการตรวจจับล่วงหน้าโดยอัตโนมัติในพืชทุ่งหญ้าต้นฤดู ซึ่งเป็นก้าวสำคัญของการวิจัยวัชพืช ในทำนองเดียวกัน Pena ˜ et al. (2013) ชี้ให้เห็นว่าการใช้ภาพที่มีความละเอียดเชิงพื้นที่สูงพิเศษจาก UAV ร่วมกับขั้นตอนของ OBIA ทำให้สามารถสร้างแผนที่วัชพืชในต้นข้าวโพดที่สามารถใช้ในการวางแผนดำเนินการตามมาตรการควบคุมวัชพืชในฤดู งานที่เกินความสามารถของดาวเทียมและภาพถ่ายทางอากาศแบบดั้งเดิม เมื่อเปรียบเทียบกับการจำแนกรูปภาพหรืออัลกอริทึมการตรวจจับวัตถุ เทคนิคการแบ่งส่วนเชิงความหมายมีประสิทธิภาพมากกว่าในงานทำแผนที่วัชพืช (J. Deng et al., 2020) จึงทำให้เกษตรกรสามารถตรวจจับสภาพของแปลงนา ลดการสูญเสีย และเพิ่มผลผลิตตลอดฤดูปลูก (Ramesh et al., 2020) การแบ่งส่วนความหมายตามการเรียนรู้เชิงลึกยังสามารถให้การวัดที่แม่นยำของพืชพรรณที่ปกคลุมจากภาพถ่ายทางอากาศที่มีความละเอียดสูง (Ramesh et al., 2020; A. Zheng et al., 2022) แม้จะมีศักยภาพในระยะไกล
การจำแนกพิกเซลที่รับรู้ได้ เทคนิคการแบ่งส่วนความหมายต้องการการคำนวณที่สำคัญและหน่วยความจำ GPU ที่สูงอย่างห้ามปราม (J. Deng et al., 2020)
P'erez-Ortiz และคณะ อาศัยการเรียนรู้ของเครื่องและ UAV (2015) เสนอแนะวิธีการทำแผนที่วัชพืชเพื่อจัดทำกลยุทธ์การควบคุมวัชพืชเฉพาะพื้นที่ เมื่อเกษตรกรใช้การควบคุมวัชพืชในระยะแรกหลังเกิด ในที่สุด Rasmussen และคณะ (2013) เน้นว่าโดรนให้การตรวจจับที่ไม่แพงพร้อมความยืดหยุ่นในความละเอียดเชิงพื้นที่ที่ยอดเยี่ยม โดยรวมแล้ว สิ่งพิมพ์ในคลัสเตอร์นี้มุ่งเน้นไปที่การสำรวจศักยภาพของ UAV เพื่อรองรับการสำรวจระยะไกล การตรวจสอบพืชผล และการทำแผนที่วัชพืช จำเป็นต้องมีการวิจัยเชิงลึกเพิ่มเติมเพื่อตรวจสอบเพิ่มเติมว่าการใช้โดรนในการตรวจสอบสิ่งแวดล้อม การจัดการพืชผล และการทำแผนที่วัชพืชสามารถบรรลุการเกษตรที่ยั่งยืนได้อย่างไร (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J Su, Liu, et al., 2018) และแก้ไขปัญหาการกำกับดูแลของเทคโนโลยีนี้ในแอปพลิเคชันประกันภัยพืชผล (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021) นักวิจัยควรให้ความสำคัญกับการตรวจสอบ UAV ที่รวบรวมการวัดด้วยเทคนิคการประมวลผลที่มีประสิทธิภาพเพื่อเพิ่มคุณภาพสูงสุดของข้อมูลที่ประมวลผล (Manfreda et al., 2018) นอกจากนี้ จำเป็นต้องมีการพัฒนาอัลกอริทึมที่เหมาะสมซึ่งจดจำพิกเซลที่แสดงวัชพืชในภาพดิจิทัลและกำจัดพื้นหลังที่ไม่เกี่ยวข้องระหว่างการทำแผนที่วัชพืชด้วย UAV (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; Lopez- ´ Granados et al., 2016) ยินดีต้อนรับการวิจัยเพิ่มเติมเกี่ยวกับการนำเทคนิคการแบ่งส่วนความหมายมาใช้ในการจดจำพืช การจำแนกใบไม้ และการทำแผนที่โรค (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020)
คลัสเตอร์ 2 สิ่งพิมพ์ในคลัสเตอร์นี้มุ่งเน้นไปที่หลายแง่มุมของโดรนเพื่อการเกษตร เกี่ยวข้องกับฟีโนไทป์ระยะไกล Sankaran และคณะ (2015) ได้ทบทวนศักยภาพของการใช้ภาพถ่ายทางอากาศที่มีระดับความสูงต่ำและมีความละเอียดสูงด้วย UAV สำหรับการสร้างฟีโนไทป์ของพืชไร่อย่างรวดเร็ว และพวกเขาโต้แย้งว่า UAV ขนาดเล็กที่มีเซ็นเซอร์เพียงพอมีข้อดีหลายประการเมื่อเทียบกับแพลตฟอร์มตรวจจับภาคพื้นดิน เช่น เข้าถึงฟิลด์ได้ง่ายขึ้น ข้อมูลความละเอียดสูง การรวบรวมข้อมูลที่มีประสิทธิภาพ
การประเมินอย่างรวดเร็วของสภาพการเจริญเติบโตของพื้นที่ และต้นทุนการดำเนินงานที่ต่ำ อย่างไรก็ตาม ผู้เขียนยังทราบว่าการประยุกต์ใช้ UAV อย่างมีประสิทธิภาพสำหรับฟีโนไทป์ภาคสนามนั้นขึ้นอยู่กับองค์ประกอบพื้นฐานสองประการ ได้แก่ คุณลักษณะของ UAV (เช่น ความปลอดภัย ความเสถียร การวางตำแหน่ง อิสระ) และคุณลักษณะของเซ็นเซอร์ (เช่น ความละเอียด น้ำหนัก ความยาวคลื่นสเปกตรัม สนาม มุมมอง) Haghighattalab et al. (2016) เสนอไปป์ไลน์การประมวลผลภาพกึ่งอัตโนมัติเพื่อดึงข้อมูลระดับพล็อตจากภาพถ่าย UAV และเร่งกระบวนการผสมพันธุ์ โฮลแมน และคณะ (2016) มีการพัฒนาอย่างสูง
ระบบฟีโนไทป์ฟิลด์ปริมาณงาน และเน้นว่า UAV สามารถรวบรวมข้อมูลฟีโนไทป์ตามภาคสนามที่มีคุณภาพ ปริมาณมาก และอุปกรณ์ดังกล่าวมีประสิทธิภาพสำหรับพื้นที่ขนาดใหญ่และในตำแหน่งฟิลด์ต่างๆ
เนื่องจากการประเมินผลผลิตเป็นข้อมูลที่สำคัญอย่างเหลือเชื่อ โดยเฉพาะอย่างยิ่งเมื่อพร้อมใช้งานตรงเวลา จึงมีความเป็นไปได้ที่ UAV จะให้การวัดภาคสนามทั้งหมดและรับข้อมูลคุณภาพสูงได้อย่างมีประสิทธิภาพ (Daakir et al., 2017; Demir et al., 2018 ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012) ในเรื่องนี้ Jin และคณะ (2017) ใช้ประโยชน์จากภาพความละเอียดสูงที่ได้รับจาก UAV ที่ระดับความสูงต่ำมากเพื่อพัฒนาและประเมินวิธีการประเมินความหนาแน่นของต้นข้าวสาลีในขั้นการงอก ผู้เขียนกล่าวว่า UAV เอาชนะข้อจำกัดของระบบโรเวอร์ที่ติดตั้งกล้อง และเป็นวิธีที่ไม่รุกรานใครในการประมาณความหนาแน่นของพืชในพืชผล ทำให้เกษตรกรสามารถบรรลุปริมาณงานสูงที่จำเป็นสำหรับการสร้างฟีโนไทป์ของภาคสนามโดยไม่ขึ้นกับความสามารถในการสัญจรไปมาของดิน หลี่และคณะ (2016) รวบรวมภาพสเตอริโอหลายร้อยภาพที่มีความละเอียดสูงมากโดยใช้ระบบที่ใช้ UAV เพื่อประเมินค่าพารามิเตอร์ของข้าวโพด รวมถึงความสูงทรงพุ่มและมวลชีวภาพเหนือพื้นดิน ในที่สุด Yue และคณะ (2017) พบว่าความสูงของพืชที่กำหนดจาก UAV สามารถเพิ่มการประมาณมวลชีวภาพเหนือพื้นดิน (AGB)
วิธีการติดตามการเจริญเติบโตของพืชคือแนวคิดในการพัฒนาแบบจำลองพื้นผิวพืช (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021) การศึกษาหลายชิ้นเน้นถึงความเป็นไปได้ของภาพที่ถ่ายจาก UAV เพื่อบันทึกความสูงของต้นไม้และติดตามการเจริญเติบโตของพวกมัน ตัวอย่างเช่น Bendig และคณะ (2013) อธิบายถึงการพัฒนาแบบจำลองพื้นผิวพืชหลายชั่วขณะที่มีความละเอียดสูงน้อยกว่า 0.05 ม. โดยใช้ UAV พวกเขามุ่งตรวจจับพืชผล
ความแปรปรวนของการเจริญเติบโตและการพึ่งพาการรักษาพืชพันธุ์และความเครียด เบ็นดิกและคณะ (2014) ใช้ UAV เพื่อประเมินมวลชีวภาพสดและแห้งตามความสูงของพืชที่สกัดจากแบบจำลองพื้นผิวพืชผล และพบว่าภาพความละเอียดสูงจาก UAV สามารถเพิ่มความแม่นยำของการสร้างแบบจำลองความสูงของพืชได้อย่างมากสำหรับการเจริญเติบโตที่แตกต่างกัน ขั้นตอน ในแนวทางเดียวกัน Geipel และคณะ (2014) ใช้ UAV ในการวิจัยเพื่อให้ได้มาซึ่งภาพ
ชุดข้อมูลสำหรับการทำนายผลผลิตข้าวโพดในช่วงการเจริญเติบโตที่แตกต่างกัน 2017 ช่วงตั้งแต่ต้นถึงกลางฤดู และสรุปได้ว่าการผสมผสานระหว่างการสร้างแบบจำลองเชิงสเปกตรัมและเชิงพื้นที่ตามภาพถ่ายทางอากาศและแบบจำลองพื้นผิวพืชผลเป็นวิธีการที่เหมาะสมในการทำนายผลผลิตข้าวโพดในช่วงกลางฤดู ในที่สุด Gnadinger ¨ และ Schmidhalter (2) ได้ตรวจสอบยูทิลิตี้ของ UAV ในรูปแบบฟีโนไทป์ที่แม่นยำ และเน้นว่าการใช้เทคโนโลยีนี้สามารถปรับปรุงการจัดการฟาร์มและเปิดใช้งานการทดลองภาคสนามเพื่อการเพาะพันธุ์และวัตถุประสงค์ทางการเกษตร โดยรวมแล้ว เราสังเกตว่าสิ่งพิมพ์ในกลุ่ม XNUMX มุ่งเน้นไปที่ข้อได้เปรียบหลักของ UAV ในระยะไกล
การสร้างฟีโนไทป์ การประมาณผลผลิต การสร้างแบบจำลองพื้นผิวพืช และการนับจำนวนพืช การศึกษาในอนาคตสามารถขุดลึกลงไปโดยการพัฒนาวิธีการใหม่สำหรับฟีโนไทป์ระยะไกลที่สามารถทำให้การประมวลผลข้อมูลที่รับรู้จากระยะไกลเป็นไปโดยอัตโนมัติและเพิ่มประสิทธิภาพ (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ., 2021). นอกจากนี้ ประสิทธิภาพของเซ็นเซอร์ IoT ที่ติดตั้งบน UAV และการแลกเปลี่ยนระหว่างต้นทุน แรงงาน และความแม่นยำในการประมาณผลผลิตจำเป็นต้องได้รับการวิจัยใน
ในอนาคต (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018) ท้ายที่สุด มีความจำเป็นต้องพัฒนาวิธีการประมวลผลภาพที่มีประสิทธิภาพซึ่งสามารถสร้างข้อมูลที่เชื่อถือได้ เพิ่มประสิทธิภาพในการผลิตทางการเกษตร และลดงานนับจำนวนด้วยมือของเกษตรกร (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020)
คลัสเตอร์ 3 เอกสารเผยแพร่ในคลัสเตอร์นี้กล่าวถึงระบบภาพประเภทต่างๆ สำหรับการสำรวจระยะไกลของทรัพยากรการเกษตรที่ใช้บนแพลตฟอร์ม UAV ในเรื่องนี้ การถ่ายภาพความร้อนช่วยให้สามารถตรวจสอบอุณหภูมิพื้นผิวเพื่อป้องกันความเสียหายของพืชผลและตรวจจับความเครียดจากภัยแล้งได้ตั้งแต่เนิ่นๆ (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; ยอม, 2021). บาลูจา และคณะ (2012) ยืนยันว่าการใช้กล้องมัลติสเปกตรัมและกล้องความร้อนบนเครื่อง
UAV ช่วยให้นักวิจัยได้รับภาพความละเอียดสูงและประเมินสถานะของน้ำในเถาองุ่น สิ่งนี้อาจเป็นประโยชน์ในการพัฒนาแบบจำลองการจัดตารางเวลาน้ำแบบใหม่โดยใช้ข้อมูลจากการสำรวจระยะไกล (Baluja et al., 2012) เนื่องจากการ
ความสามารถในการรับน้ำหนักที่จำกัดของ UAV, Ribeiro-Gomes และคณะ (2017) ได้พิจารณาการรวมกล้องจับความร้อนที่ไม่มีการระบายความร้อนเข้ากับ UAVS เพื่อระบุความเครียดของน้ำในโรงงาน ซึ่งทำให้ UAV ประเภทนี้มีประสิทธิภาพและใช้งานได้มากกว่าการสำรวจระยะไกลผ่านดาวเทียมแบบดั้งเดิม และ UAV ที่ติดตั้งกล้องระบายความร้อน ผู้เขียนกล่าวว่ากล้องระบายความร้อนที่ไม่มีการระบายความร้อนนั้นเบากว่ากล้องที่ระบายความร้อน ซึ่งจำเป็นต้องมีการสอบเทียบที่เหมาะสม กอนซาเลซ-ดูโก และคณะ (2014) แสดงให้เห็นว่าภาพถ่ายความร้อนสร้างแผนที่เชิงพื้นที่ของดัชนีความเครียดของน้ำพืชได้อย่างมีประสิทธิภาพสำหรับการประเมินสถานะของน้ำและหาปริมาณความเครียดของน้ำระหว่างและภายในสวนส้ม กอนซาเลซ-ดูโก และคณะ (2013) และ Santesteban et al. (2017) ตรวจสอบการใช้ภาพถ่ายความร้อน UAV ความละเอียดสูงเพื่อประเมินความแปรปรวนของสถานะน้ำของสวนผลไม้เชิงพาณิชย์และไร่องุ่น
การถ่ายภาพหลายสเปกตรัมสามารถให้ข้อมูลจำนวนมากเมื่อเปรียบเทียบกับภาพ RGB (แดง เขียว และน้ำเงิน) แบบดั้งเดิม (Ad˜ ao et al., 2017; Navia et al., 2016) ข้อมูลเชิงสเปกตรัมนี้ พร้อมด้วยข้อมูลเชิงพื้นที่ สามารถช่วยในการจำแนกประเภท การทำแผนที่ การพยากรณ์ การทำนาย และการตรวจจับ (Berni et al., 2009b) ตามที่ Candiago และคณะ (2015) การถ่ายภาพหลายสเปกตรัมที่ใช้ UAV สามารถมีส่วนร่วมอย่างมากในการประเมินพืชผลและการเกษตรที่แม่นยำในฐานะทรัพยากรที่เชื่อถือได้และมีประสิทธิภาพ อีกด้วย,
คาลิคและคณะ (2019) ทำการเปรียบเทียบระหว่างการถ่ายภาพหลายสเปกตรัมบนดาวเทียมและ UAV ภาพที่ใช้ UAV ส่งผลให้อธิบายความแปรปรวนของไร่องุ่นได้แม่นยำยิ่งขึ้น รวมถึงแผนที่ความแข็งแรงสำหรับแสดงเรือนยอดพืชผล โดยสรุป บทความในกลุ่มนี้จะกล่าวถึงการรวมเซนเซอร์ภาพความร้อนและมัลติสเปกตรัมเข้ากับ UAV ทางการเกษตร ด้วยเหตุนี้ จึงจำเป็นต้องมีการวิจัยเพิ่มเติมเพื่อทำความเข้าใจว่าการถ่ายภาพความร้อนและการถ่ายภาพหลายสเปกตรัมสามารถรวมเข้ากับ AI ได้อย่างไร
เทคนิค (เช่น การเรียนรู้เชิงลึก) เพื่อตรวจจับความเครียดของพืช (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021) ข้อมูลเชิงลึกดังกล่าวจะช่วยให้การตรวจจับมีประสิทธิภาพและแม่นยำยิ่งขึ้น รวมทั้งการติดตามการเจริญเติบโตของพืช ความเครียด และลักษณะทางพฤกษศาสตร์ (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
คลัสเตอร์ 4 คลัสเตอร์นี้ประกอบด้วยเอกสาร 2009 ฉบับที่เกี่ยวกับบทบาทสำคัญของการถ่ายภาพสเปกตรัมและการถ่ายภาพไฮเปอร์สเปกตรัมในการสนับสนุนการปฏิบัติทางการเกษตร การถ่ายภาพไฮเปอร์สเปกตรัมได้สร้างตัวเองให้เป็นวิธีการรับรู้ระยะไกลที่ช่วยให้สามารถประเมินเชิงปริมาณของระบบโลกได้ (Schaepman et al., XNUMX) เพื่อให้แม่นยำยิ่งขึ้น ช่วยให้สามารถระบุวัสดุพื้นผิว ปริมาณของความเข้มข้น (สัมพัทธ์) และ การกำหนดสัดส่วนส่วนประกอบพื้นผิว
ภายในพิกเซลผสม (Kirsch et al., 2018; Zhao et al., 2022) กล่าวอีกนัยหนึ่ง ความละเอียดของสเปกตรัมที่สูงขึ้นจากระบบไฮเปอร์สเปกตรัมทำให้สามารถประมาณพารามิเตอร์ต่างๆ ได้แม่นยำยิ่งขึ้น เช่น คุณสมบัติของมังสวิรัติหรือปริมาณน้ำในใบ (Suomalainen et al., 2014) นักวิจัยในกลุ่มนี้ตรวจสอบแง่มุมต่าง ๆ ของระบบดังกล่าว ท่ามกลางคนอื่น ๆ Aasen และคณะ (2015b) เสนอวิธีการที่ไม่เหมือนใครในการรับข้อมูลไฮเปอร์สเปกตรัมสามมิติจากวัตถุน้ำหนักเบา
กล้องสแนปช็อตที่ใช้กับ UAV สำหรับการตรวจสอบพืชพรรณ ลูเซียร์และคณะ (2014) กล่าวถึงการออกแบบ การพัฒนา และการปฏิบัติการทางอากาศของ UAS ไฮเปอร์สเปกตรัมแบบใหม่ ตลอดจนการสอบเทียบ การวิเคราะห์ และการตีความข้อมูลภาพที่รวบรวมไว้ด้วยกัน ในที่สุด Honkavaara และคณะ (2013b) ได้พัฒนาแนวทางการประมวลผลที่ครอบคลุมสำหรับภาพสเปกตรัมที่ใช้เครื่องวัดระดับอินเตอร์เฟอโรต์ของ FabryPerot และแสดงการใช้งานในขั้นตอนการประเมินมวลชีวภาพสำหรับการเกษตรแบบแม่นยำ แนวทางที่เป็นไปได้ในอนาคตสำหรับคลัสเตอร์ปัจจุบันนี้รวมถึงการเน้นย้ำถึงความจำเป็นในการปรับปรุงทางเทคนิคในเทคโนโลยีเซนเซอร์ (Aasen et al., 2015b) ตลอดจนความจำเป็นในการผสมผสานและปรับปรุงเทคโนโลยีเสริม โดยเฉพาะข้อมูลขนาดใหญ่และการวิเคราะห์ (Ang & Seng, 2021; Radoglou -Grammatikis et al., 2020; Shakoor et al., 2019) ส่วนใหญ่เกิดจากข้อมูลที่เพิ่มขึ้นเรื่อย ๆ ที่สร้างขึ้นโดยเซ็นเซอร์ต่าง ๆ ที่นำมาใช้ในการเกษตรอัจฉริยะ (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021)
คลัสเตอร์ 5 สิ่งพิมพ์ในคลัสเตอร์นี้ตรวจสอบแอปพลิเคชัน 3Dmapping ที่ใช้โดรน การใช้โดรนสำหรับการทำแผนที่ 3 มิติสามารถบรรเทาการทำงานภาคสนามที่ซับซ้อนและเพิ่มประสิทธิภาพได้อย่างมาก (Torres-Sanchez ´ et al., 2015) ห้าบทความในคลัสเตอร์มุ่งเน้นไปที่แอปพลิเคชันการตรวจสอบโรงงานเป็นหลัก ตัวอย่างเช่น หากต้องการรับข้อมูลสามมิติเกี่ยวกับพื้นที่ทรงพุ่ม ความสูงของต้นไม้ และปริมาตรยอด Torres-Sanchez ´ et al. (2015) ใช้เทคโนโลยี UAV เพื่อสร้างแบบจำลองพื้นผิวดิจิทัล จากนั้นใช้วิธีการวิเคราะห์ภาพตามวัตถุ (OBIA) นอกจากนี้ Zarco-Tejada และคณะ (2014) วัดความสูงของต้นไม้โดยการรวมเทคโนโลยี UAV และวิธีการสร้างภาพสามมิติใหม่ Jim'enez-Brenes Lopez-Granados, ´ De Castro และคณะ (2017) แสดงให้เห็นถึงกระบวนการใหม่สำหรับการเฝ้าติดตามแบบ 3 มิติแบบหลายช่วงเวลาของต้นมะกอกหลายสิบต้นโดยการรวมเทคโนโลยี UAV เข้ากับระเบียบวิธี OBIA ขั้นสูง เส้นทางที่น่าสนใจสำหรับการทำงานในอนาคตในคลัสเตอร์นี้ ได้แก่ การปรับปรุงปัจจุบัน
วิธีการ (Zarco-Tejada et al., 2014) สำหรับวัตถุประสงค์ในการสร้างแบบจำลองพื้นผิวดิจิทัล (Ajayi et al., 2017; Jaud et al., 2016) เช่น OBIA (de Castro et al., 2018, 2020; Ventura et al. , 2018) และการสร้างภาพถ่ายใหม่หรือการพัฒนาวิธีการใหม่ๆ (Díaz-Varela et al., 2015; Torres-S´ anchez et al., 2015)
คลัสเตอร์ที่ 6 คลัสเตอร์นี้กล่าวถึงบทบาทของโดรนในการเฝ้าระวังทางการเกษตร UAVs สามารถเสริมและเอาชนะข้อบกพร่องของการถ่ายภาพดาวเทียมและเครื่องบิน ตัวอย่างเช่น สามารถให้ความละเอียดสูงในการถ่ายภาพแบบเรียลไทม์โดยใช้เชื้อเพลิงน้อยลงหรือมีความท้าทายในการขับเครื่องบิน ส่งผลให้มีการเฝ้าระวังและปรับปรุงการตัดสินใจแบบเรียลไทม์อย่างต่อเนื่อง (S. Herwitz et al., 2004) การสนับสนุนที่สำคัญอีกประการหนึ่งของ UAVs คือความสามารถในการให้ข้อมูลเฉพาะพื้นที่สำหรับการเกษตรแม่นยำหรือการทำฟาร์มเฉพาะพื้นที่เนื่องจากความละเอียดสูง ข้อมูลรายละเอียดเกี่ยวกับพารามิเตอร์ต่างๆ ช่วยให้เกษตรกรสามารถแบ่งที่ดินออกเป็นส่วนที่เป็นเนื้อเดียวกันและจัดการตามนั้น (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012) การเฝ้าระวังทางการเกษตรโดยใช้ UAV ดังกล่าวสามารถสนับสนุนการตรวจสอบและการตัดสินใจด้านความมั่นคงทางอาหาร (SR Herwitz et al., 2004) เพื่อพัฒนาการวิจัยด้านการเฝ้าระวังทางการเกษตร ไม่เพียงแต่ต้องปรับปรุงเซ็นเซอร์ UAV และเทคโนโลยีที่เกี่ยวข้องอื่นๆ รวมถึงวิธีการสื่อสารและการถ่ายโอนข้อมูลเท่านั้น (Ewing et al., 2020; Shuai et al., 2019) แต่ยังรวมโดรนเข้ากับอุปกรณ์ต่างๆ เทคโนโลยีสำหรับการเพิ่มประสิทธิภาพงานต่างๆ ที่เกี่ยวข้องกับการเกษตรอัจฉริยะ เช่น การเฝ้าติดตาม การเฝ้าระวังทางการเกษตร และการตัดสินใจ เป็นพื้นที่วิจัยที่มีศักยภาพสูง (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018) ในเรื่องนี้ IoT, WSN และข้อมูลขนาดใหญ่นำเสนอความสามารถเสริมที่น่าสนใจ (van der Merwe et al., 2020) ค่าใช้จ่ายในการดำเนินการ การประหยัดต้นทุน ประสิทธิภาพพลังงาน และความปลอดภัยของข้อมูล อยู่ในส่วนที่อยู่ภายใต้การวิจัยสำหรับการผสานรวมดังกล่าว (Masroor et al., 2021)
ประเทศและสถาบันการศึกษา
ขั้นตอนสุดท้ายรวมถึงการตรวจสอบประเทศต้นทางและความร่วมมือทางวิชาการของผู้เขียน จากการวิเคราะห์นี้ เรามีเป้าหมายที่จะเข้าใจการกระจายทางภูมิศาสตร์ของนักวิชาการที่มีส่วนสนับสนุนการใช้โดรนในการเกษตรให้ดียิ่งขึ้น เป็นที่น่าสังเกตที่จะสังเกตเห็นความหลากหลายของประเทศและสถาบันการศึกษา จากมุมมองของแต่ละประเทศ สหรัฐอเมริกา จีน อินเดีย และอิตาลีอยู่ในอันดับต้น ๆ ของรายการในแง่ของจำนวนสิ่งพิมพ์ (ตารางที่ 7) ปัจจุบัน
การวิจัยเกี่ยวกับโดรนเพื่อการเกษตรมีศูนย์กลางอยู่ที่ประเทศในอเมริกาเหนือและเอเชียเป็นส่วนใหญ่ เนื่องจากส่วนใหญ่เกี่ยวข้องกับการใช้งานด้านการเกษตรแม่นยำสูง ตัวอย่างเช่น ในสหรัฐอเมริกา ตลาดโดรนเพื่อการเกษตรมีมูลค่าประมาณ 841.9 ล้านเหรียญสหรัฐในปี 2020 ซึ่งคิดเป็นประมาณ 30% ของส่วนแบ่งการตลาดทั่วโลก (ReportLinker, 2021) ประเทศจีนได้รับการจัดอันดับให้เป็นประเทศที่มีเศรษฐกิจใหญ่ที่สุดในโลก โดยคาดว่าจะมีขนาดตลาดประมาณ 2.6 พันล้านเหรียญสหรัฐในปี 2027 ประเทศนี้กำลังดึงดูดโดรนเพื่อการเกษตรเพื่อเอาชนะปัญหาด้านผลผลิตและบรรลุผลผลิตที่ดีขึ้น การบรรเทาแรงงาน และปัจจัยการผลิตที่น้อยลง อย่างไรก็ตาม การนำเทคโนโลยีมาใช้ในจีนยังได้รับแรงผลักดันจากปัจจัยต่างๆ เช่น ขนาดของประชากร และความจำเป็นในการคิดค้นและปรับปรุงแนวทางปฏิบัติในการจัดการพืชผลที่มีอยู่
ประเทศที่มีประสิทธิผลสูงสุดและมหาวิทยาลัย/องค์กรที่มีส่วนร่วม
งานวิจัยที่เกี่ยวข้องกับโดรนเพื่อการเกษตร
| อันดับ | ประเทศ |
| 1 | สหรัฐอเมริกา |
| 2 | สาธารณรัฐประชาชนจีน |
| 3 | อินเดีย |
| 4 | อิตาลี |
| 5 | สเปน |
| 6 | ประเทศเยอรมัน |
| 7 | บราซิล |
| 8 | ออสเตรเลีย |
| 9 | ประเทศญี่ปุ่น |
| 10 | สหราชอาณาจักร |
| อันดับ | มหาวิทยาลัย/องค์กร |
| 1 | จีน Academy of Sciences |
| 2 | กระทรวงเกษตรแห่งสาธารณรัฐประชาชนจีน |
| 3 | สภาที่สูงขึ้นสำหรับการวิจัยทางวิทยาศาสตร์ |
| 4 | มหาวิทยาลัย Texas A&M |
| 5 | มหาวิทยาลัยเกษตรจีน |
| 6 | บริการวิจัยการเกษตรของ USDA |
| 7 | CSIC – Instituto de Agricultura รับรอง IAS |
| 8 | มหาวิทยาลัยเพอร์ดู |
| 9 | สภาวิจัยแห่งชาติ |
| 10 | มหาวิทยาลัยเกษตรศาสตร์ตอนใต้ของจีน |
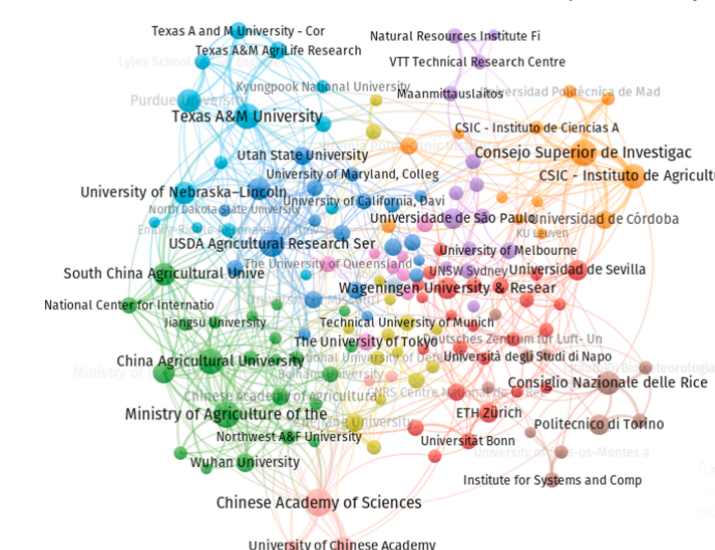
จากมุมมองของมหาวิทยาลัยและองค์กร Chinese Academy of Sciences อยู่ในอันดับต้น ๆ ในแง่ของจำนวนสิ่งพิมพ์ ตามมาด้วยกระทรวงเกษตรแห่งสาธารณรัฐประชาชนจีน และ Consejo Superior de Investigaciones Científicas Chinese Academy of Sciences เป็นตัวแทนของผู้เขียน Liao Xiaohan และ Li Jun; หาน เหวินติงเป็นตัวแทนของกระทรวงเกษตรแห่งสาธารณรัฐประชาชนจีน และ Consejo Superior de Investigaciones Científicas เป็นตัวแทนจาก Lopez-Granados, ´ F. และ Pena, ˜ Jos´e María S. จากสหรัฐอเมริกา มหาวิทยาลัยต่างๆ เช่น Texas A&M University และ Purdue University พบว่าพวกเขา
กล่าวถึง. มหาวิทยาลัยที่มีจำนวนสิ่งพิมพ์และความสัมพันธ์สูงสุดแสดงอยู่ในรูปที่ 4 นอกจากนี้ รายชื่อนี้รวมถึงสถาบันต่างๆ เช่น Consiglio Nazionale delle Ricerche และ Consejo Superior de Investigaciones Científicas ที่ทำงานด้านการวิจัยทางวิทยาศาสตร์ แต่ไม่ใช่สถาบันการศึกษา .
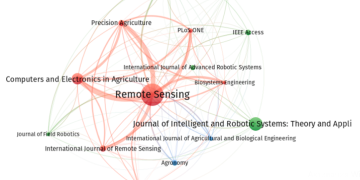
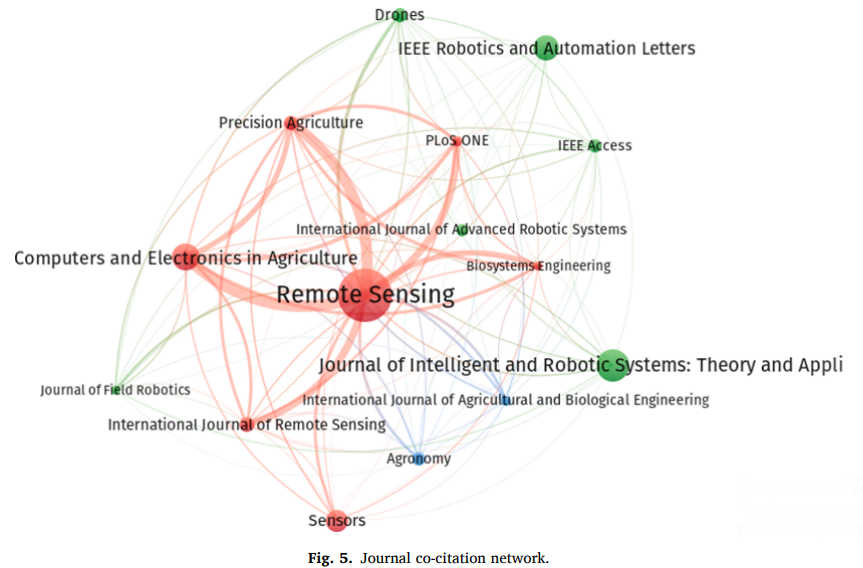
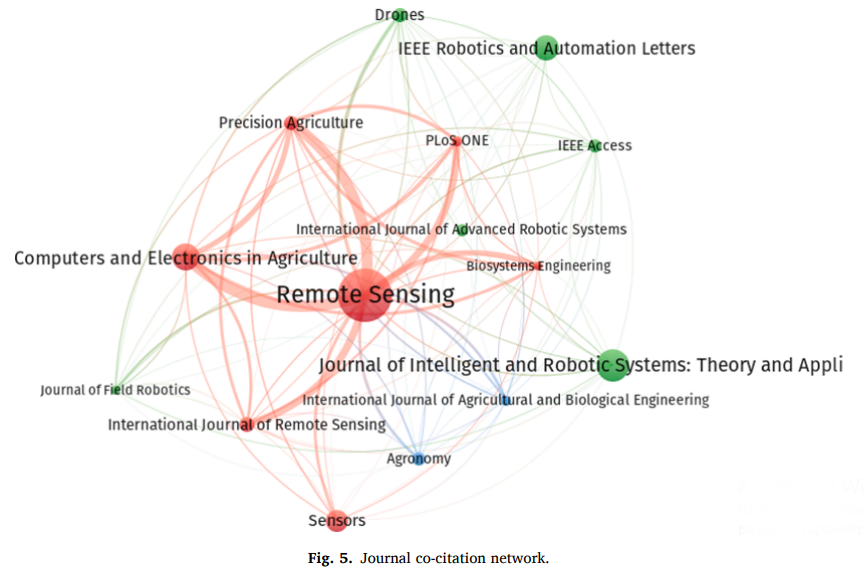
การเลือกของเรามีวารสารที่หลากหลาย ครอบคลุมข้อมูลเกือบทั้งหมดที่มีอยู่ ดังที่แสดงในตารางที่ 8 การสำรวจระยะไกลมีบทความ 258 บทความอยู่ในอันดับต้น ๆ ตามด้วย Journal of Intelligent and Robotic Systems: Theory and Applications 126 บทความ และ Computers and Electronics in Agriculture 98 บทความ แม้ว่าการสำรวจระยะไกลจะมุ่งเน้นไปที่การประยุกต์ใช้และการพัฒนาโดรนเป็นส่วนใหญ่ แต่คอมพิวเตอร์และอุปกรณ์อิเล็กทรอนิกส์ในการเกษตรส่วนใหญ่ครอบคลุมความก้าวหน้าในฮาร์ดแวร์คอมพิวเตอร์ ซอฟต์แวร์ อุปกรณ์อิเล็กทรอนิกส์ และระบบควบคุมในการเกษตร ร้านค้าข้ามพื้นที่เช่น IEEE Robotics และ Automation Letters ที่มีสิ่งพิมพ์ 87 รายการและ IEEE Access ที่มีสิ่งพิมพ์ 34 รายการก็เป็นร้านค้าชั้นนำในสาขานี้เช่นกัน ร้านค้าสิบห้าอันดับแรกได้สนับสนุนวรรณกรรมด้วยเอกสาร 959 ฉบับ ซึ่งคิดเป็นประมาณ 20.40% ของสิ่งพิมพ์ทั้งหมด การวิเคราะห์การอ้างอิงร่วมในวารสารช่วยให้เราสามารถตรวจสอบความสำคัญและความคล้ายคลึงกันระหว่างสิ่งพิมพ์ต่างๆ การวิเคราะห์แบบอ้างอิงร่วมกันทำให้ได้กลุ่มข้อมูล 5 กลุ่ม ดังแสดงในรูปที่ XNUMX กลุ่มสีแดงประกอบด้วยวารสารต่างๆ เช่น การสำรวจระยะไกล คอมพิวเตอร์และอิเล็กทรอนิกส์ในการเกษตร เซ็นเซอร์
และวารสารนานาชาติของการสำรวจระยะไกล ช่องทางเหล่านี้ทั้งหมดเป็นวารสารที่มีชื่อเสียงอย่างมากในด้านการสำรวจระยะไกลและการเกษตรแบบแม่นยำ คลัสเตอร์สีเขียวประกอบด้วยวารสารที่เกี่ยวข้องกับวิทยาการหุ่นยนต์ เช่น Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access และ Drones ร้านค้าเหล่านี้ส่วนใหญ่เผยแพร่เอกสารเกี่ยวกับระบบอัตโนมัติและมีประโยชน์สำหรับวิศวกรการเกษตร กลุ่มสุดท้ายประกอบด้วยวารสารที่เกี่ยวข้องกับพืชไร่และวิศวกรรมเกษตร เช่น พืชไร่และวารสารวิศวกรรมเกษตรและชีวภาพนานาชาติ
วารสาร 15 อันดับแรกในการวิจัยเกี่ยวกับโดรนเพื่อการเกษตร
| อันดับ | วารสาร | นับ |
| 1 | การสำรวจระยะไกล | 258 |
| 2 | วารสารระบบอัจฉริยะและหุ่นยนต์: ทฤษฎีและ การใช้งาน | 126 |
| 3 | คอมพิวเตอร์และอิเล็กทรอนิกส์ในการเกษตร | 98 |
| 4 | IEEE Robotics และจดหมายอัตโนมัติ | 87 |
| 5 | เซนเซอร์ | 73 |
| 6 | วารสารนานาชาติของการสำรวจระยะไกล | 42 |
| 7 | เกษตรแม่นยำ | 41 |
| 8 | โดรน | 40 |
| 9 | เกษตรศาสตร์ | 34 |
| 10 | การเข้าถึง IEEE | 34 |
| 11 | วารสารนานาชาติของระบบหุ่นยนต์ขั้นสูง | 31 |
| 12 | วารสารนานาชาติวิศวกรรมเกษตรและชีวภาพ | 25 |
| 13 | PLoS ONE | 25 |
| 14 | วารสารวิทยาการหุ่นยนต์ภาคสนาม | 23 |
| 15 | วิศวกรรมชีวภาพ | 23 |
สรุป
สรุป
ในการศึกษานี้ เราได้สรุปและวิเคราะห์งานวิจัยที่มีอยู่เกี่ยวกับโดรนเพื่อการเกษตร เราพยายามใช้เทคนิคบรรณานุกรมต่างๆ เพื่อทำความเข้าใจโครงสร้างทางปัญญาของการวิจัยเกี่ยวกับโดรนทางการเกษตรให้ดียิ่งขึ้น โดยสรุปแล้ว การทบทวนของเราเสนอการสนับสนุนหลายประการโดยการระบุและอภิปรายคำหลักในเอกสาร เปิดเผยกลุ่มความรู้ในขณะที่สร้างชุมชนที่คล้ายกันในเชิงความหมายในด้านของโดรน สรุปการวิจัยก่อนหน้านี้ และแนะนำทิศทางการวิจัยในอนาคต ด้านล่าง เราได้ร่างข้อค้นพบหลักของการทบทวนเกี่ยวกับการพัฒนาโดรนเพื่อการเกษตร:
• วรรณกรรมโดยรวมเติบโตอย่างรวดเร็วและดึงดูดความสนใจอย่างมากในช่วงทศวรรษที่ผ่านมา ซึ่งบ่งชี้ได้จากจำนวนบทความที่เพิ่มขึ้นหลังปี 2012 แม้ว่าความรู้ด้านนี้จะยังไม่บรรลุวุฒิภาวะเต็มที่ (Barrientos et al., 2011; Maes & Steppe, 2019) คำถามหลายข้อยังไม่ได้รับคำตอบ ตัวอย่างเช่น ประโยชน์ของโดรนในการทำฟาร์มในร่มยังคงเปิดให้ถกเถียงกัน (Aslan et al., 2022; Krul et al., 2021; Rold´ an et al., 2015) ความซับซ้อนของฉากในท้องทุ่งและสถานการณ์การถ่ายภาพที่แตกต่างกัน (เช่น เงาและแสง) อาจส่งผลให้สเปกตรัมแปรปรวนในระดับที่สูงขึ้น (Yao et al., 2019) แม้ในขั้นตอนการวิจัยระยะหลังๆ นักวิจัยยังถูกท้าทายให้กำหนดแผนการบินที่เหมาะสมที่สุดตามสถานการณ์เฉพาะและคุณภาพของภาพที่ต้องการ (Soares et al., 2021; Tu et al.,
2020)
• เราสังเกตเห็นว่าสาขานี้มีความก้าวหน้าตั้งแต่การพัฒนาระบบ UAV ที่มีประสิทธิภาพไปจนถึงการรวมเทคนิค AI เช่น การเรียนรู้ของเครื่องและการเรียนรู้เชิงลึกในการออกแบบโดรนเพื่อการเกษตร (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020)
• งานวิจัยเกี่ยวกับโดรนเพื่อการเกษตรส่วนใหญ่กล่าวถึงการรับรู้จากระยะไกลโดยการสำรวจศักยภาพของเทคโนโลยีในการตรวจสอบสิ่งแวดล้อม การจัดการพืชผล และการจัดการวัชพืช (คลัสเตอร์ 1) ตลอดจนฟีโนไทป์ระยะไกลและการประมาณผลผลิต (คลัสเตอร์ 2) ชุดการศึกษาที่มีอิทธิพลเกี่ยวกับโดรนเพื่อการเกษตร ได้แก่ Austin (2010), Berni et al. (2009)a, Herwitz และคณะ (2004), Nex และ Remondino (2014) และ Zhang และ Kovacs (2012) การศึกษาเหล่านี้พัฒนาพื้นฐานแนวคิดของการวิจัยที่เกี่ยวข้องกับโดรนในบริบทของการเกษตร
• ที่เกี่ยวข้องกับวิธีการ เราสังเกตว่างานวิจัยส่วนใหญ่ที่ทำจนถึงตอนนี้ประกอบด้วยการออกแบบระบบ แนวคิด หรือการศึกษาตามการทบทวน (Inoue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; Yao et al., 2019). นอกจากนี้ เรายังสังเกตเห็นการขาดวิธีการเชิงประจักษ์ คุณภาพ และกรณีศึกษาที่ใช้ในการตรวจสอบโดรนเพื่อการเกษตร
• เมื่อเร็ว ๆ นี้ หัวข้อที่เกี่ยวข้องกับการเกษตรแม่นยำ เทคนิค AI การปลูกองุ่นแม่นยำ และการประเมินความเครียดของน้ำได้รับความสนใจอย่างมาก (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021) การตรวจสอบกลุ่มวิจัยอย่างระมัดระวังในสองยุคที่แยกจากกัน ระหว่างปี 1990–2010 และ 2011–2021 เผยให้เห็นความก้าวหน้าของโครงสร้างทางปัญญาของโดเมน ช่วงเวลาตั้งแต่ปี 1990 ถึง 2010 เป็นการสร้างแนวคิดหลักและแนวคิดเกี่ยวกับโดรน ซึ่งเห็นได้ชัดจากการอภิปรายเกี่ยวกับการออกแบบ การพัฒนา และการใช้งาน UAV ในยุคที่ XNUMX การวิจัยจะมุ่งเน้นไปที่การศึกษาก่อนหน้านี้ โดยพยายามสังเคราะห์กรณีการใช้งาน UAV ในภาคการเกษตร นอกจากนี้ เรายังพบการศึกษาจำนวนมากที่กล่าวถึงการใช้โดรนในงานด้านการถ่ายภาพและการเกษตรแบบแม่นยำ
| อันดับ | วารสาร | นับ |
| 1 | การสำรวจระยะไกล | 258 |
| 2 | วารสารระบบอัจฉริยะและหุ่นยนต์: ทฤษฎีและ | 126 |
| การใช้งาน | ||
| 3 | คอมพิวเตอร์และอิเล็กทรอนิกส์ในการเกษตร | 98 |
| 4 | IEEE Robotics และจดหมายอัตโนมัติ | 87 |
| 5 | เซนเซอร์ | 73 |
| 6 | วารสารนานาชาติของการสำรวจระยะไกล | 42 |
| 7 | เกษตรแม่นยำ | 41 |
| 8 | โดรน | 40 |
| 9 | เกษตรศาสตร์ | 34 |
| 10 | การเข้าถึง IEEE | 34 |
| 11 | วารสารนานาชาติของระบบหุ่นยนต์ขั้นสูง | 31 |
| 12 | วารสารนานาชาติวิศวกรรมเกษตรและชีวภาพ | 25 |
| 13 | PLoS ONE | 25 |
| 14 | วารสารวิทยาการหุ่นยนต์ภาคสนาม | 23 |
| 15 | วิศวกรรมชีวภาพ | 22 |
ผลกระทบ
การตรวจสอบบรรณานุกรมของเราได้รับการออกแบบและดำเนินการโดยคำนึงถึงนักวิชาการ เกษตรกร ผู้เชี่ยวชาญด้านการเกษตร ที่ปรึกษาด้านพืชผล และนักออกแบบระบบ UAV เพื่อความรู้ที่ดีที่สุดของผู้เขียน นี่เป็นหนึ่งในบทวิจารณ์ดั้งเดิมชุดแรกที่ได้ดำเนินการวิเคราะห์ทางบรรณานุกรมเชิงลึกของ
การประยุกต์ใช้โดรนในการเกษตร เราได้ดำเนินการตรวจสอบเนื้อหาความรู้นี้อย่างครอบคลุม โดยใช้การอ้างอิงและการวิเคราะห์ร่วมของสิ่งพิมพ์ ความพยายามของเราในการอธิบายโครงสร้างทางปัญญาของการวิจัยโดรนยังนำเสนอข้อมูลเชิงลึกใหม่สำหรับนักวิชาการ การตรวจสอบคำสำคัญที่ใช้ในช่วงเวลาหนึ่งอย่างละเอียดถี่ถ้วนจะเผยให้เห็นจุดสำคัญและจุดสนใจในการวิจัยในวรรณกรรมที่เกี่ยวข้องกับโดรน นอกจากนี้ เรานำเสนอรายการการศึกษาที่ได้รับการอ้างถึงมากที่สุดเพื่อระบุงานวิจัยที่มีผลกระทบมากที่สุดซึ่งเสร็จสิ้นในสาขานี้ การระบุบทความและคำหลักอาจเป็นจุดเริ่มต้นที่มั่นคงในการเปิดช่องทางต่างๆ สำหรับการศึกษาในอนาคต
ที่สำคัญ เราได้เปิดเผยกลุ่มที่จัดประเภทงานเปรียบเทียบและให้รายละเอียดเกี่ยวกับผลลัพธ์ การศึกษาที่จำแนกเป็นกลุ่มช่วยในการทำความเข้าใจโครงสร้างทางปัญญาของการวิจัย UAV โดยเฉพาะอย่างยิ่ง เราค้นพบการศึกษาที่ตรวจสอบปัจจัยการยอมรับของโดรน
และอุปสรรคในการทำฟาร์ม (ดูตารางที่ 9) นักวิจัยในอนาคตสามารถแก้ไขช่องว่างที่อาจเกิดขึ้นนี้ได้โดยดำเนินการตรวจสอบเชิงประจักษ์ที่ประเมินปัจจัยการนำโดรนไปใช้ในกิจกรรมการทำฟาร์มและสภาพอากาศที่แตกต่างกัน นอกจากนี้ การวิจัยตามกรณีศึกษาเกี่ยวกับประสิทธิภาพของโดรนควรได้รับการสนับสนุนด้วยข้อมูลจริงจากภาคสนาม นอกจากนี้ การมีส่วนร่วมของเกษตรกรและผู้จัดการในการวิจัยเชิงวิชาการจะเป็นประโยชน์สำหรับความก้าวหน้าทั้งทางทฤษฎีและทางปฏิบัติของการวิจัยโดรน นอกจากนี้ เรายังสามารถระบุนักวิจัยที่โดดเด่นที่สุดและผลงานของพวกเขา ซึ่งเป็นสิ่งที่มีค่า เนื่องจากการตระหนักรู้เกี่ยวกับผลงานล่าสุดสามารถให้คำแนะนำสำหรับความพยายามทางวิชาการในอนาคตได้
9 ตาราง
อุปสรรคในการรับ UAV
| อุปสรรค | รายละเอียด |
| ความปลอดภัยของข้อมูล | การรักษาความปลอดภัยทางไซเบอร์เป็นความท้าทายที่สำคัญสำหรับการนำไปใช้ โซลูชัน IoT (Masroor et al., 2021) |
| การทำงานร่วมกันและ บูรณาการ | เทคโนโลยีต่างๆ เช่น UAV, WSN, IoT เป็นต้น ควรมีการผสมผสานและส่งข้อมูลซึ่ง เพิ่มระดับความซับซ้อน (Alsamhi et al., 2021; โปเปสคู และคณะ, 2020; Vuran et al., 2018). |
| ค่าใช้จ่ายในการดำเนินการ | นี่เป็นกรณีเฉพาะสำหรับเกษตรกรรายย่อยและสำหรับ ผสานรวมเทคโนโลยีล้ำสมัยต่างๆ ( Masroor et al., 2021) |
| ความรู้ด้านแรงงานและ ความชำนาญ | จำเป็นต้องมีนักบินโดรนที่มีทักษะในการใช้งาน UAV อีกทั้งการนำความล้ำสมัยต่างๆ เทคโนโลยีต้องการแรงงานที่มีทักษะ (YB Huang et al., 2013; Tsouros et al., 2019) |
| กำลังเครื่องยนต์และการบิน ระยะเวลา | ไม่สามารถใช้งานโดรนเป็นเวลานานและปิดฝาได้ พื้นที่ขนาดใหญ่ (Hardin & Hardin, 2010; Laliberte et al., 2007) |
| เสถียรภาพ ความน่าเชื่อถือ และ ความคล่องแคล่ว | โดรนไม่เสถียรในช่วงที่สภาพอากาศเลวร้าย (Hardin & Hardin, 2010; Laliberte et al., 2007) |
| ข้อ จำกัด ของน้ำหนักบรรทุกและ คุณภาพของเซ็นเซอร์ | โดรนสามารถบรรทุกน้ำหนักได้จำกัดเท่านั้น ความสามารถในการโหลดเซ็นเซอร์คุณภาพต่ำ (Nebiker et al., 2008) |
| การควบคุม | เนื่องจากโดรนอาจเป็นอันตรายได้ จึงมีความรุนแรงเช่นกัน ข้อบังคับในบางพื้นที่ (Hardin & Jensen, 2011; ลาลิแบร์เต & รังโก, 2011). |
| ความรู้ของเกษตรกรและ อยากเรียนรู้ | เช่นเดียวกับเทคโนโลยีล้ำสมัยอื่น ๆ โดรน การใช้งานที่ประสบความสำเร็จจำเป็นต้องมีความเชี่ยวชาญและด้วย มาพร้อมกับความไม่แน่นอน (Fisher et al., 2009; แลมเบิร์ต และคณะ, 2004; สแตฟฟอร์ด, 2000). |
เนื่องจากมีความจำเป็นอย่างต่อเนื่องในการใช้ทรัพยากรที่มีอยู่อย่างมีประสิทธิภาพเพื่อเพิ่มผลผลิต เกษตรกรจึงสามารถใช้ประโยชน์จากโดรนเพื่อให้แน่ใจว่าการสแกนไร่นาของพวกเขารวดเร็ว แม่นยำ และคุ้มค่า เทคโนโลยีนี้สามารถสนับสนุนเกษตรกรในการกำหนดสภาพพืชผลและประเมินสถานะของน้ำ ระยะการสุก การเข้าทำลายของแมลง และความต้องการทางโภชนาการ ความสามารถในการรับรู้ระยะไกลของโดรนสามารถให้ข้อมูลที่สำคัญแก่เกษตรกรเพื่อคาดการณ์ปัญหาในระยะแรกและดำเนินการแทรกแซงที่เหมาะสมในทันที อย่างไรก็ตาม ประโยชน์ของเทคโนโลยีจะเกิดขึ้นได้ก็ต่อเมื่อมีการจัดการกับความท้าทายอย่างเหมาะสม ในแง่ของ
ปัญหาปัจจุบันเกี่ยวกับความปลอดภัยของข้อมูล ปัญหาเทคโนโลยีเซ็นเซอร์ (เช่น ความน่าเชื่อถือหรือความแม่นยำของการวัด) ความซับซ้อนของการรวมระบบ และค่าใช้จ่ายในการดำเนินการจำนวนมาก การศึกษาในอนาคตยังต้องตรวจสอบความเป็นไปได้ทางเทคนิค เศรษฐกิจ และการดำเนินงานของการรวมโดรนเกษตรและเครื่องมือตัดแต่งอื่นๆ เทคโนโลยีที่ทันสมัย
ข้อ จำกัด
การศึกษาของเรามีข้อ จำกัด หลายประการ. ประการแรก การค้นพบจะถูกกำหนดโดยสิ่งพิมพ์ที่เลือกสำหรับการวิเคราะห์ขั้นสุดท้าย การรวบรวมการศึกษาที่เกี่ยวข้องทั้งหมดที่เกี่ยวข้องกับโดรนเพื่อการเกษตรเป็นเรื่องท้าทาย โดยเฉพาะอย่างยิ่งการศึกษาที่ไม่ได้จัดทำดัชนีในฐานข้อมูล Scopus นอกจากนี้ กระบวนการรวบรวมข้อมูลยังจำกัดเฉพาะการตั้งค่าคำหลักที่ใช้ค้นหา ซึ่งอาจไม่ครอบคลุมและนำไปสู่การค้นพบที่สรุปไม่ได้ ดังนั้น การศึกษาในอนาคตจำเป็นต้องให้ความสำคัญกับประเด็นพื้นฐานของการรวบรวมข้อมูลที่จะทำ
ข้อสรุปที่น่าเชื่อถือมากขึ้น ข้อจำกัดอีกประการหนึ่งเกี่ยวข้องกับสิ่งพิมพ์ใหม่ที่มีจำนวนการอ้างอิงน้อย การวิเคราะห์ทางบรรณานุกรมมีอคติต่อสิ่งตีพิมพ์ก่อนหน้านี้เนื่องจากมีแนวโน้มที่จะได้รับการอ้างอิงมากขึ้นในช่วงหลายปีที่ผ่านมา การศึกษาล่าสุดต้องใช้เวลาระยะหนึ่งเพื่อดึงดูดความสนใจและรวบรวมการอ้างอิง ดังนั้น งานศึกษาล่าสุดที่นำมาซึ่งการปรับเปลี่ยนกระบวนทัศน์จึงไม่ติดอันดับหนึ่งในสิบงานที่มีอิทธิพลสูงสุด ข้อจำกัดนี้แพร่หลายในการตรวจสอบขอบเขตการวิจัยที่เกิดขึ้นอย่างรวดเร็ว เช่น โดรนเพื่อการเกษตร เนื่องจากเราได้ปรึกษากับ Scopus เพื่อศึกษาวรรณกรรมสำหรับงานนี้ นักวิจัยในอนาคตอาจพิจารณาแตกต่างออกไป
ฐานข้อมูลต่างๆ เช่น Web of Science และ IEEE Xplore เพื่อขยายขอบเขตและปรับปรุงโครงสร้างการวิจัย
การศึกษาบรรณานุกรมที่มีศักยภาพอาจพิจารณาแหล่งความรู้ที่สำคัญอื่นๆ เช่น เอกสารการประชุม บทต่างๆ และหนังสือเพื่อสร้างข้อมูลเชิงลึกใหม่ๆ แม้จะมีการทำแผนที่และตรวจสอบสิ่งตีพิมพ์ทั่วโลกเกี่ยวกับโดรนเพื่อการเกษตร แต่การค้นพบของเราไม่ได้เปิดเผยเหตุผลที่อยู่เบื้องหลังผลลัพธ์ทางวิชาการของมหาวิทยาลัย นี่เป็นการปูทางไปสู่ขอบเขตการวิจัยใหม่ในเชิงคุณภาพเพื่ออธิบายว่าทำไมมหาวิทยาลัยบางแห่งจึงมีประสิทธิผลมากกว่าที่อื่นเมื่อพูดถึงการวิจัยเกี่ยวกับการเกษตร
ลูกกระจ๊อก นอกจากนี้ การศึกษาในอนาคตอาจให้ข้อมูลเชิงลึกเกี่ยวกับศักยภาพของโดรนเพื่อเพิ่มความยั่งยืนในการทำฟาร์มได้หลายวิธี เช่น การตรวจสอบด้านสิ่งแวดล้อม การจัดการพืชผล และการทำแผนที่วัชพืชตามที่นักวิจัยหลายคนระบุ (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b) เนื่องจากไม่สามารถวิเคราะห์ข้อความได้เนื่องจากบทความที่เลือกมีจำนวนสูง จึงจำเป็นต้องมีการทบทวนวรรณกรรมอย่างเป็นระบบเพื่อตรวจสอบ
วิธีการวิจัยที่ใช้และการมีส่วนร่วมของเกษตรกรในการศึกษาก่อนหน้า ในระยะสั้น การวิเคราะห์การวิจัยโดรนของเราเผยให้เห็นความเชื่อมโยงที่มองไม่เห็นขององค์ความรู้นี้ การทบทวนนี้จึงช่วยเปิดเผยความสัมพันธ์ระหว่างสิ่งตีพิมพ์และสำรวจโครงสร้างทางปัญญาของสาขาการวิจัย นอกจากนี้ยังแสดงให้เห็นความเชื่อมโยงระหว่างลักษณะต่างๆ ของวรรณกรรม เช่น คำสำคัญของผู้แต่ง สังกัด และประเทศ
การประกาศผลประโยชน์ที่แข่งขันกัน
ผู้เขียนประกาศว่าพวกเขาไม่มีผลประโยชน์ทางการเงินที่เป็นคู่แข่งกันหรือความสัมพันธ์ส่วนตัวที่อาจมีอิทธิพลต่องานที่รายงานในบทความนี้
1 ภาคผนวก
TITLE-ABS-KEY ((( โดรน* หรือ “อากาศยานไร้คนขับ” หรือ uav* หรือ “ระบบอากาศยานไร้คนขับ” หรือ uas หรือ “เครื่องบินขับระยะไกล”) และ (เกษตรกรรมหรือเกษตรกรรมหรือเกษตรกรรมหรือชาวนา))) และ (ยกเว้น (PUBYEAR, 2022)) และ (จำกัดเฉพาะ (ภาษา “ภาษาอังกฤษ”))
อ้างอิง
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015 การสร้างข้อมูลไฮเปอร์สเปกตรัม 3 มิติด้วยกล้องสแนปช็อต UAV น้ำหนักเบาสำหรับการตรวจสอบพืช: จาก
การสอบเทียบกล้องเพื่อการประกันคุณภาพ ISPRS J. โฟโตแกรม รีโมตเซ็น 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. การพัฒนาอัลกอริธึมการจดจำรูปแบบสำหรับการตรวจจับนกอัตโนมัติจากภาพถ่ายทางอากาศไร้คนขับ
สำรวจ. ที่ดินแจ้ง. วิทย์ 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021 เครือข่ายเซ็นเซอร์ไร้สายในการเกษตร: ข้อมูลเชิงลึกจากการวิเคราะห์บรรณานุกรม ความยั่งยืน 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., การประเมินวิธีการต่างๆ สำหรับการตรวจจับเงาในภาพออพติคอลความละเอียดสูง และการประเมินผลกระทบของเงาในการคำนวณ ของ NDVI และการคายระเหย เออร์ริก วิทย์ 37(3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017 การถ่ายภาพแบบไฮเปอร์สเปกตรัม: การตรวจทานเซ็นเซอร์ที่ใช้ UAV ข้อมูล การประมวลผลและ
การประยุกต์ใช้งานด้านการเกษตรและป่าไม้ การสำรวจระยะไกล 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015 การถ่ายภาพแบบหลายช่วงเวลาโดยใช้อากาศยานไร้คนขับเพื่อติดตามพืชผลทานตะวัน ไบโอซิส อังกฤษ
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017 การสร้างแบบจำลองระดับความสูงดิจิทัลที่แม่นยำจาก UAV ได้รับภาพที่ซ้อนทับกันในเปอร์เซ็นต์ที่ต่ำ ภายใน
เจ. เซ็นเซอร์ระยะไกล 38 (8–10), 3113–3134 https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. การทบทวนแนวทางการเรียนรู้ของเครื่องสำหรับการดึงมวลชีวภาพและความชื้นในดินจากข้อมูลการสำรวจระยะไกล การสำรวจระยะไกล 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Green internet of things โดยใช้ UAVs ในเครือข่าย B5G: การทบทวนแอปพลิเคชัน
และกลยุทธ์ โฆษณา เฉพาะกิจ เน็ต 117, 102505 https://doi.org/10.1016/j. เฉพาะกิจ.2021.102505.
Al-Thani, N. , Albuainain, A. , Alnaimi, F. , Zorba, N. , 2020 โดรนสำหรับการตรวจสอบปศุสัตว์แกะ ใน: การประชุม IEEE Mediterranean Electrotechnical ครั้งที่ 20 https://ดอย.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019 ฟีโนไทป์ปริมาณงานสูงที่ใช้ UAV ในส้มโดยใช้การถ่ายภาพหลายสเปกตรัมและปัญญาประดิษฐ์ การสำรวจระยะไกล 11 (4), https://doi.org/10.3390/rs11040410
Ampatzidis, Y., Partel, V., Costa, L., 2020 Agroview: แอปพลิเคชันบนคลาวด์เพื่อประมวลผล วิเคราะห์ และแสดงภาพข้อมูลที่รวบรวมโดย UAV สำหรับแอปพลิเคชันการเกษตรแม่นยำโดยใช้ปัญญาประดิษฐ์ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 174, 105457 https://อย. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021 ข้อมูลขนาดใหญ่และการเรียนรู้ของเครื่องด้วยข้อมูลไฮเปอร์สเปกตรัมในภาคการเกษตร การเข้าถึง IEEE 9, 36699–36718 https://doi.org/10.1109/
การเข้าถึง2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022 ทบทวน: เทคโนโลยีการเลี้ยงปศุสัตว์ที่แม่นยำในระบบปศุสัตว์แบบทุ่งหญ้า สัตว์ 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., แนวโน้มของเทคโนโลยีสารสนเทศและการสื่อสารขั้นสูงสำหรับ
การปรับปรุงผลผลิตทางการเกษตร: การวิเคราะห์ทางบรรณานุกรม พืชไร่นา 10(12), ข้อ 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011 จระเข้บิน: สู่หุ่นยนต์ทางอากาศใน occam-π ชุมชน สถาปนิกกระบวนการ 2011, 329–340. https://ดอย. org/10.3233/978-1-60750-774-1-329
Arora, SD, Chakraborty, A. , 2021 โครงสร้างทางปัญญาของการวิจัยพฤติกรรมการร้องเรียนของผู้บริโภค (CCB): การวิเคราะห์บรรณานุกรม J. Business Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022
การสำรวจที่ครอบคลุมของการศึกษาล่าสุดด้วย UAV สำหรับการเกษตรแบบแม่นยำในทุ่งโล่งและเรือนกระจก แอป วิทย์ 12(3), 1047. https://doi.org/10.3390/
แอพ12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E. และ Wells, DM (2018) ฟีโนไทป์ภาคสนามสำหรับอนาคต ในการทบทวนโรงงานประจำปีออนไลน์ (หน้า 719–736) จอห์น
Wiley & Sons, Ltd. ดอย: 10.1002/9781119312994.apr0651
Austin, R., 2010. ระบบอากาศยานไร้คนขับ: การออกแบบ การพัฒนา และการปรับใช้ UAVS ใน: Unmanned Aircraft Systems: UAVS Design, Development and
การปรับใช้ จอห์น ไวลีย์และลูกชาย https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022 การสำรวจระยะไกลโดยใช้ UAV ในความเครียดของพืช จินตนาการโดยใช้เซ็นเซอร์ความร้อนความละเอียดสูงสำหรับการปฏิบัติด้านการเกษตรแบบดิจิทัล: การทบทวนเมตา ภายใน เจ. เอ็นไวรอน. วิทย์ เทคโนโลยี https://ดอย.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. การทำฟาร์มอัจฉริยะ: โอกาส ความท้าทาย
และตัวเปิดใช้งานเทคโนโลยี 2018 IoT แนวตั้งและ การประชุมสุดยอดหัวข้อด้านการเกษตร -ทัสคานี (IOT Tuscany) 1–6 https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018 การเรียนรู้เชิงลึกด้วยการติดฉลากข้อมูลแบบไม่มีผู้ดูแลสำหรับการตรวจจับวัชพืชในพืชเส้นในภาพ UAV การสำรวจระยะไกล 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. กระบวนการเชิงบรรทัดฐานกับกระบวนการคอนสตรัคติวิสต์ทางสังคมในการจัดสรรการอ้างอิง: แบบจำลองการวิเคราะห์เครือข่าย เป็น. สังคม รายได้ 63 (6), 829–846 https://ดอย.
org / 10.2307 / 2657504
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012 การประเมินความแปรปรวนของสถานะน้ำในไร่องุ่นด้วยความร้อนและมัลติสเปกตรัม
ภาพถ่ายโดยใช้อากาศยานไร้คนขับ (UAV) เออร์ริก วิทย์ 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D. , Tondelli, A. , Desiderio, F. , Volante, A. , Vaccino, P. , Val`e, G. , Cattivelli, L. , การผสมพันธุ์รุ่นต่อไป วิทย์พืช. 242, 3–13. https://doi.org/10.1016/j.
plantci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018 มุมมองเกี่ยวกับการใช้ระบบทางอากาศไร้คนขับเพื่อเฝ้าดูปศุสัตว์ Outlook เกษตร 47(3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G. , Aasen, H. , Bendig, J. , Gnyp, ML, Bolten, A. , Jung, A. , Michels, R. , Soukkamaki, ¨ J. , 2015 ไฮเปอร์สเปกตรัมที่ใช้ UAV น้ำหนักเบาและ UAV กล้องฟูลเฟรม
สำหรับการตรวจสอบพืชผล: การเปรียบเทียบสเปกตรัมกับการวัดสเปกโตรเรดิโอมิเตอร์แบบพกพา Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A. , Colorado, J. , del Cerro, J. , Martinez, A. , Rossi, C. , Sanz, D. , Valente, J. การสำรวจระยะไกลทางอากาศในการเกษตร: แนวทางปฏิบัติเพื่อครอบคลุมพื้นที่
และการวางแผนเส้นทางสำหรับฝูงบินของหุ่นยนต์ทางอากาศขนาดเล็ก เจ ฟิลด์ ร็อบ 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022 การสำรวจเกี่ยวกับการประยุกต์ใช้อัลกอริธึมการวางแผนเส้นทางสำหรับ UAV แบบหลายใบพัดอย่างแม่นยำ
เกษตรกรรม. เจ. นาวิก. 75 (2), 364–383.
Basnet, B. , Bang, J. , 2018 การเกษตรที่เน้นความรู้ขั้นสูง: การทบทวนระบบการรับรู้ประยุกต์และการวิเคราะห์ข้อมูล เจ. เซนส์ 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013 การถ่ายภาพโดยใช้ UAV สำหรับแบบจำลองพื้นผิวพืชที่มีความละเอียดสูงมากแบบหลายชั่วขณะ เพื่อตรวจสอบความผันแปรของการเติบโตของพืชผล Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://ดอย. org/10.1127/1432-8364/2013/0200
Bendig, J. , Bolten, A. , Bennertz, S. , Broscheit, J. , Eichfuss, S. , Bareth, G. , 2014 การประมาณมวลชีวภาพของข้าวบาร์เลย์โดยใช้แบบจำลองพื้นผิวพืชผล (CSM) ที่ได้มาจากการถ่ายภาพ RGB ที่ใช้ UAV การสำรวจระยะไกล 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015 การรวมความสูงของพืชตาม UAV จากพื้นผิวพืช โมเดล,
ดัชนีพืชพรรณที่มองเห็นได้และใกล้อินฟราเรดสำหรับการตรวจสอบมวลชีวภาพในข้าวบาร์เลย์ ภายใน เจ แอพเพิล Earth Obs. จีโออินเอฟ 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a การทำแผนที่สื่อนำไฟฟ้าทรงพุ่มและ CWSI ในสวนมะกอกโดยใช้ความละเอียดสูง
ภาพจากการสำรวจความร้อนจากระยะไกล รีโมท Sens. สิ่งแวดล้อม. 113(11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´L., Fereres, E., 2009b. การสำรวจระยะไกลแบบหลายสเปกตรัมความร้อนและแถบความถี่แคบสำหรับการตรวจสอบพืชพรรณจากยานพาหนะทางอากาศไร้คนขับ IEEE ทรานส์ ธรณี รีโมตเซ็น 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019 Internet of Things ในความปลอดภัยของอาหาร: การทบทวนวรรณกรรมและการวิเคราะห์บรรณานุกรม เทรนด์วิทย์อาหาร. เทคโนโลยี 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017 IoT ในการเกษตร: การออกแบบนักบินขนาดใหญ่ทั่วยุโรป ชุมชน IEEE แม็ก 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019 การติดตาม UAV หลายเซ็นเซอร์ของต้นกล้าแต่ละต้นและชุมชนต้นกล้าที่ความแม่นยำระดับมิลลิเมตร โดรน 3(4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S. , Remondino, F. , De Giglio, M. , Dubbini, M. , Gattelli, M. , 2015 การประเมินภาพหลายสเปกตรัมและดัชนีพืชพรรณสำหรับแอปพลิเคชันการทำฟาร์มที่แม่นยำจากภาพ UAV การสำรวจระยะไกล 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020 การตรวจสอบตัวบ่งชี้การเจริญเติบโตของหัวบีตโดยใช้ดัชนีพืชพรรณช่วงไดนามิกกว้าง (WDRVI) ที่ได้มาจาก UAV
ภาพหลายสเปกตรัม คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007 วิวัฒนาการของโครงสร้างทางปัญญาของวรรณกรรมธุรกิจครอบครัว: การศึกษาบรรณานุกรมของ FBR ธุรกิจครอบครัว ฉบับที่ 20 (2), 141–162
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019 การตรวจสอบแบบไดนามิกของมวลชีวภาพของข้าวภายใต้
การบำบัดด้วยไนโตรเจนที่แตกต่างกันโดยใช้ UAV น้ำหนักเบาพร้อมกล้องสแนปช็อตเฟรมภาพคู่ วิธีปลูก 15(1), 32. https://doi.org/10.1186/s13007-019-
0418 8-
Chamuah, A., Singh, R., 2019 การรักษาความยั่งยืนในภาคการเกษตรของอินเดียผ่าน UAV พลเรือน: มุมมองด้านนวัตกรรมที่มีความรับผิดชอบ แอป SN วิทย์ 2(1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. การกำกับดูแลอย่างมีความรับผิดชอบของนวัตกรรมยานพาหนะทางอากาศไร้คนขับ (UAV) ของพลเรือนสำหรับการใช้งานประกันภัยพืชผลในอินเดีย ญ. มีความรับผิดชอบ
เทคโนโลยี 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019 การนำภาพถ่ายทางอากาศช่องสัญญาณที่มองเห็นได้ความละเอียดสูงของเรือนยอดพืชผลมาใช้กับการจัดการชลประทานที่แม่นยำ เกษตร. น้ำ
จัดการ 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017 UAV น้ำหนักเบาพร้อมโฟโตแกรมมาตรวัดออนบอร์ดและตำแหน่ง GPS ความถี่เดียว สำหรับการใช้งานด้านมาตรวิทยา ISPRS J. โฟโตแกรม รีโมตเซ็น 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020 แพลตฟอร์ม IoT ที่ใช้บล็อกเชนสำหรับการจัดการการดำเนินงานโดรนอัตโนมัติ ใน: การดำเนินการของ บก.น.2
MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, หน้า 31–36 https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B. , 1998 วิธีเขียนและเผยแพร่บทความทางวิทยาศาสตร์ สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020 การทำแผนที่ cynodon dactylon รบกวน คลุมพืชผลด้วยขั้นตอน OBIA ต้นไม้ตัดสินใจอัตโนมัติและภาพ UAV สำหรับการปลูกองุ่นที่แม่นยำ การสำรวจระยะไกล 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018 อัลกอริทึมป่า-OBIA แบบสุ่มอัตโนมัติสำหรับ การทำแผนที่วัชพืชในช่วงต้นระหว่างและภายในแถวครอบตัดโดยใช้ภาพ UAV การสำรวจระยะไกล 10 (2) https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018 การวัดความสูงของพืชของยีนข้าวสาลีโดยอัตโนมัติโดยใช้ DSM ที่ได้มาจากภาพ UAV การดำเนินการ 2 (7), 350 https://doi.org/10.3390/ecrs-2-05163
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y. , 2020 เครือข่ายการแบ่งกลุ่มความหมายแบบน้ำหนักเบาสำหรับการทำแผนที่วัชพืชแบบเรียลไทม์โดยใช้ยานพาหนะทางอากาศไร้คนขับ แอป วิทย์ 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018 การสำรวจระยะไกลหลายสเปกตรัมที่ใช้ UAV สำหรับการเกษตรที่แม่นยำ: การเปรียบเทียบระหว่างกล้องต่างๆ ISPRS J. โฟโตแกรม รีโมตเซ็น 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022 การเรียนรู้ด้วยเครื่องและเทคนิคการรับรู้จากระยะไกลที่ใช้เพื่อประเมินตัวบ่งชี้ดิน – ทบทวน อีคอล. ดัชนี 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015 ภาพถ่าย UAV ทางอากาศความละเอียดสูงเพื่อประเมินพารามิเตอร์มงกุฎต้นมะกอกโดยใช้ภาพถ่าย 3 มิติ
การสร้างใหม่: การประยุกต์ใช้ในการทดลองปรับปรุงพันธุ์ การสำรวจระยะไกล 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021 การจัดการความจุของสนามบิน: การทบทวนและการวิเคราะห์บรรณานุกรม เจ.แอร์ ทรานสปอร์ต จัดการ 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019
การใช้ภาพ RapidEye เพื่อระบุความผันแปรของการเติบโตและผลผลิตของพืชผลในออนแทรีโอ แคนาดา เกษตรแม่นยำ 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-ว.
Dutta, PK, Mitra, S., 2021 การประยุกต์ใช้โดรนเพื่อการเกษตรและไอโอทีเพื่อทำความเข้าใจห่วงโซ่อุปทานอาหารในช่วงหลังโควิด-19 ใน: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (บรรณาธิการ), สารสนเทศการเกษตร: ระบบอัตโนมัติโดยใช้ IoT และการเรียนรู้ของเครื่อง ไวลีย์ หน้า 67–87 van Eck, N., Waltman, L., 2009. การสำรวจซอฟต์แวร์: VOSviewer โปรแกรมคอมพิวเตอร์สำหรับการทำแผนที่บรรณานุกรม ไซเอนโทเมตริกส์ 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, ภาษาฮินดี, MN, 2018 ภาพรวมของ Internet of Things (IoT) และการวิเคราะห์ข้อมูลในภาคการเกษตร: ประโยชน์และความท้าทาย
IEEE Internet Things J. 5 (5), 3758–3773
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019 การตรวจสอบความถูกต้องของพืชไร่ UAV และภาคสนาม
การวัดพันธุ์มะเขือเทศ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017 การประเมินความเครียดของน้ำแบบมัลติสเปกตรัมความละเอียดสูงและการรับรู้ความร้อนจากระยะไกลใน
ต้นองุ่นใต้ผิวน้ำ การสำรวจระยะไกล 9 (9), 961 https://doi.org/ 10.3390/rs9090961
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020 ใช้การรับรู้ระยะไกลแบบไฮเปอร์สเปกตรัมสำหรับการไล่ระดับดิน การสำรวจระยะไกล 12(20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020 การประเมินหลายระดับของการสะท้อนแสงพื้นผิวหลายสเปกตรัมและดัชนีพืชพรรณบนโดรนในสภาพการปฏิบัติงาน การสำรวจระยะไกล 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019 การศึกษาเทคโนโลยีการสื่อสารไร้สายบน Internet of Things สำหรับการเกษตรแบบแม่นยำ ไร้สาย Pers ชุมชน 108 (3),
1785-1802
Ferreira, MP, Pinto, CF, Serra, FR, 2014 ทฤษฎีต้นทุนการทำธุรกรรมในการวิจัยธุรกิจระหว่างประเทศ: การศึกษาบรรณานุกรมกว่าสามทศวรรษ ไซเอนโทเมตริกส์ 98 (3), 1899–1922 https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. ความก้าวหน้าด้านการเกษตรแม่นยำในออสเตรเลียตะวันออกเฉียงใต้ I. วิธีการถดถอยเพื่อจำลอง
การแปรผันเชิงพื้นที่ของผลผลิตธัญญาหารโดยใช้ผลผลิตคอกม้าในอดีตของเกษตรกรและดัชนีพืชผลความแตกต่างปกติ วิทย์พืชไร่. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015 วิทยาศาสตร์ เทคโนโลยี และอนาคตของโดรนไร้คนขับขนาดเล็ก ธรรมชาติ 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021 Internet of Things สำหรับอนาคตของการเกษตรอัจฉริยะ: การสำรวจที่ครอบคลุมเกี่ยวกับเทคโนโลยีที่เกิดขึ้นใหม่ IEEE CAA เจ. ออโตม ซินิก้า 8(4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Range, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019 การแบ่งส่วนต้นมะเดื่อ จากภาพถ่ายทางอากาศโดยใช้เครือข่ายเครื่องเข้ารหัส-เครื่องถอดรหัสแบบวงรอบลึก การสำรวจระยะไกล 11 (10), 1157 https://doi.org/10.3390/rs11101157
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015 UAVs ท้าทายในการประเมินความเครียดของน้ำสำหรับ
เกษตรกรรมยั่งยืน เกษตร. การจัดการน้ำ 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. การถ่ายภาพความร้อน ที่โรงงาน
ระดับเพื่อประเมินสถานะน้ำของพืชในต้นอัลมอนด์ (cv. Guara) ภายใต้กลยุทธ์การชลประทานที่ขาดดุล เกษตร. การจัดการน้ำ 208, 176–186. https://doi.org/10.1016/j.
อักวัต.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. การสะท้อนแสงพื้นผิวและการวัดสเปกโทรสโกปีฟลูออเรสเซนซ์ที่เกิดจากแสงแดดโดยใช้ UAS ไฮเปอร์สเปกตรัมขนาดเล็ก การสำรวจระยะไกล 9(5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020 วิธีการอัตโนมัติสำหรับ
การทำแผนที่วัชพืชในทุ่งข้าวโอ๊ตตามภาพถ่าย UAV คอมพิวเตอร์ อิเล็กตรอน. เกษตร.
Gebbers, R., Adamchuk, VI, 2010 เกษตรกรรมแม่นยำและความมั่นคงทางอาหาร วิทยาศาสตร์ 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. รวมการสร้างแบบจำลองสเปกตรัมและเชิงพื้นที่ของผลผลิตข้าวโพดตามภาพถ่ายทางอากาศและแบบจำลองพื้นผิวพืชผลที่ได้มาจากระบบอากาศยานไร้คนขับ การสำรวจระยะไกล 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020 การออกแบบที่ยั่งยืนสำหรับผู้ใช้: การทบทวนวรรณกรรมและการวิเคราะห์บรรณานุกรม สิ่งแวดล้อม. วิทย์ มลพิษ ความละเอียด 27(24), 29824–29836. https://ดอย. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. การสร้างพื้นผิวตอบสนองสเปกตรัมโดยการรวมดาวเทียมหลายสเปกตรัมและไฮเปอร์สเปกตรัม
ภาพถ่าย UAV สำหรับงานเกษตรแม่นยำ IEEE J. เซล สูงสุด. แอป Earth Obs. รีโมตเซ็น 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. การเกษตรที่ใช้ IoT เป็นคลาวด์และบริการข้อมูลขนาดใหญ่: จุดเริ่มต้นของดิจิทัลอินเดีย เจ. ออร์ก. และคอมพิวเตอร์ของผู้ใช้ปลายทาง (JOEUC) 29 (4),
1-23
Gmür, M. , 2006 การวิเคราะห์ร่วมและการค้นหาวิทยาลัยที่มองไม่เห็น: การประเมินระเบียบวิธี ไซเอนโทเมตริกส์ 57 (1), 27–57. https://doi.org/10.1023/
เป็น:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017 การนับต้นข้าวโพดแบบดิจิตอลโดยอากาศยานไร้คนขับ (UAV) การสำรวจระยะไกล 9 (6) https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010 อากาศยานไร้คนขับแบบปีกหมุนสำหรับการเฝ้าระวังวัชพืชในน้ำและ
การจัดการ. เจ อินเทล ระบบหุ่นยนต์: ทฤษฎี แอป 57 (1–4), 467–484. https://ดอย. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. การประเมินความแม่นยำของกระเบื้องโมเสคจากภาพถ่ายอากาศยานไร้คนขับ (UAV) เพื่อการเกษตรแบบแม่นยำในข้าวสาลี แม่นยำ เกษตร. 15(1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016 ฟีโนไทป์ภาคสนามของความเครียดของน้ำในระดับต้นไม้โดยภาพที่รับรู้โดย UAV : ข้อมูลเชิงลึกใหม่สำหรับ
การได้มาซึ่งความร้อนและการสอบเทียบ แม่นยำ เกษตร. 17(6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014 การบังคับใช้และข้อจำกัดของการใช้ดัชนีความเค้นน้ำของพืชเป็นตัวบ่งชี้การขาดน้ำในสวนส้ม เกษตร. สำหรับ. เมเทอรอล. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013 การใช้ภาพถ่ายความร้อน UAV ความละเอียดสูงเพื่อ
ประเมินความแปรปรวนของสถานะน้ำของไม้ผล 14 ชนิดภายในสวนผลไม้เชิงพาณิชย์ แม่นยำ เกษตร. 6(660), 678–10.1007. https://doi.org/11119/s013-9322-9-XNUMX.
Goyal, K., Kumar, S., 2021. ความรู้ทางการเงิน: การทบทวนอย่างเป็นระบบและการวิเคราะห์บรรณานุกรม. ภายใน J. ผู้บริโภคศึกษา 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. ศักยภาพโฟโตแกรมเมตริกของ UAV ต้นทุนต่ำในป่าไม้และการเกษตร หอจดหมายเหตุระหว่างประเทศของ Photogrammetry, การสำรวจระยะไกลและวิทยาศาสตร์ข้อมูลเชิงพื้นที่ – หอจดหมายเหตุ ISPRS 37, 1207–1213 https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. การประเมินความสัมพันธ์ของความละเอียดสูง
NDVI พร้อมระดับการใส่ปุ๋ยและผลผลิตของข้าวและข้าวสาลีโดยใช้ UAV ขนาดเล็ก การสำรวจระยะไกล 11(2), 112.
Gundolf, K., Filser, M., 2013. การวิจัยการจัดการและศาสนา: การวิเคราะห์การอ้างอิง เจ.บัส. จริยธรรม 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S. , 2020 การจำลอง CFD และการตรวจสอบเชิงทดลองของพื้นที่ และการกระจายชั่วขณะของ
การไหลเวียนของอากาศแบบ downwash ของ UAV การเกษตรแบบ Quad-rotor ในโฮเวอร์ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P'erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , โปแลนด์, J., 2016.
การประยุกต์ใช้ระบบเสาอากาศไร้คนขับสำหรับฟีโนไทป์ปริมาณงานสูงของเรือนเพาะชำพันธุ์ข้าวสาลีขนาดใหญ่ วิธีการปลูกพืช 12 (1). https://doi.org/10.1186/s13007-
016-0134-6
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013 การถ่ายภาพสเปกตรัมจาก UAV ภายใต้สภาวะการส่องสว่างที่แตกต่างกัน . ใน GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, pp. 189–194) International Society for Photogrammetry และ Remote Sensing https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. เทคนิคการประเมินสำหรับการทำแผนที่พืชพันธุ์เกาะจากอากาศไร้คนขับ
ภาพยานพาหนะ (UAV): การจำแนกพิกเซล การตีความด้วยภาพ และแนวทางการเรียนรู้ของเครื่อง ภายใน เจ แอพเพิล Earth Obs. จีโออินเอฟ 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021 การทำฟาร์มอัจฉริยะผ่านความเป็นผู้นำที่มีความรับผิดชอบในบังคลาเทศ: ความเป็นไปได้ โอกาส และอื่นๆ
ความยั่งยืน 13(8), 4511.
Hardin, PJ, Hardin, TJ, 2010 ยานพาหนะขนาดเล็กที่ขับระยะไกลในการวิจัยด้านสิ่งแวดล้อม เข็มทิศภูมิศาสตร์ 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x
Hardin, PJ, Jensen, RR, 2011 อากาศยานไร้คนขับขนาดเล็กในการสำรวจระยะไกลด้านสิ่งแวดล้อม: ความท้าทายและโอกาส สกอ. รีโมตเซ็น 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021 Internet of Things ทางการเกษตร: เทคโนโลยีและแอปพลิเคชัน (ฉบับที่ 1 ฉบับปี 2021) สปริงเกอร์.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
การถ่ายภาพจากอากาศยานไร้คนขับ: การเฝ้าระวังทางการเกษตรและการสนับสนุนการตัดสินใจ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 44 (1), 49–61. https://doi.org/10.1016/j.
คอมแพค.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, ฟีโนไทป์ภาคสนามปริมาณงานสูงของความสูงและอัตราการเจริญเติบโตของต้นข้าวสาลีในการทดลองแปลงภาคสนามโดยใช้การสำรวจระยะไกลโดยใช้ UAV การสำรวจระยะไกล 8 (12). https://ดอย. org/10.3390/rs8121031
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013 การประมวลผลและการประเมิน ของภาพสเปกโตรเมตริกสามมิติที่รวบรวมโดยใช้กล้องสเปกตรัม UAV น้ำหนักเบาเพื่อการเกษตรที่แม่นยำ การสำรวจระยะไกล 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016 บริการ Internet of Things ของอากาศยานไร้คนขับระดับความสูงต่ำ: การสำรวจที่ครอบคลุมและมุมมองในอนาคต IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005 รวมการไหลของออปติกและการนำทางแบบสเตอริโอของหุบเขาในเมืองสำหรับ UAV ใน: 2005 IEEE/RSJ
การประชุมนานาชาติเรื่องหุ่นยนต์และระบบอัจฉริยะ หน้า 3309–3316 https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020 แพลตฟอร์มการเกษตร IoT เชิงสร้างสรรค์สำหรับการประมวลผลหมอกบนคลาวด์ ยังชีพประคับประคอง. คอมพิวเตอร์ รายละเอียด ระบบ 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018 เครือข่ายแบบเต็มรูปแบบสำหรับการทำแผนที่วัชพืชของอากาศยานไร้คนขับ ( UAV) ภาพถ่าย กรุณาหนึ่ง 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J. , 2020 การเรียนรู้เชิงลึกกับการวิเคราะห์รูปภาพตามวัตถุ (OBIA) ในการทำแผนที่วัชพืชของภาพ UAV ภายใน เจ
เซ็นเซอร์ระยะไกล 41 (9), 3446–3479 https://doi.org/10.1080/01431161.2019.1706112.
Huang, H. , Yang, A. , Tang, Y. , Zhuang, J. , Hou, C. , Tan, Z. , Dananjayan, S. , He, Y. , Guo, Q. , Luo, S. , พ.ศ. 2021 การปรับเทียบสีเชิงลึกสำหรับภาพถ่าย UAV ในการตรวจสอบการครอบตัด
ใช้การถ่ายทอดลักษณะความหมายด้วยความสนใจจากท้องถิ่นสู่สากล ภายใน เจ แอพเพิล Earth Obs. จีโออินเอฟ 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013 การพัฒนาและโอกาสของเทคโนโลยีอากาศยานไร้คนขับสำหรับการผลิตทางการเกษตร
การจัดการ. ภายใน เจ. อกริก. ไบโอล อังกฤษ 6 (3), 1–10. https://doi.org/10.3965/ญ. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009 การพัฒนาระบบสเปรย์สำหรับแพลตฟอร์มอากาศยานไร้คนขับ แอป อังกฤษ เกษตร. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010 การได้มาซึ่งภาพถ่ายดิจิทัล NIR-เขียว-น้ำเงินจาก
อากาศยานไร้คนขับสำหรับติดตามพืชผล การสำรวจระยะไกล 2 (1), 290–305. https://ดอย. org/10.3390/rs2010290 Inoue, Y., 2020 การสำรวจพืชผลและดินจากระยะไกลด้วยดาวเทียมและโดรนสำหรับการทำฟาร์มอัจฉริยะ – บทวิจารณ์ ดินวิทย์. ธาตุอาหารพืช 66(6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021 การทบทวนแอปพลิเคชันและเทคโนโลยีการสื่อสารสำหรับ Internet of Things (IoT) และ
อากาศยานไร้คนขับ (UAV) จากการทำฟาร์มอัจฉริยะที่ยั่งยืน ความยั่งยืน 13 (4), 1821 https://doi.org/10.3390/su13041821
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016 การประเมินความถูกต้องของแบบจำลองพื้นผิวดิจิตอลความละเอียดสูงที่คำนวณโดย
PhotoScan® และ MicMac® ในสภาวะการสำรวจที่ไม่เหมาะสม การสำรวจระยะไกล 8 (6), https://doi.org/10.3390/rs8060465
Jim´enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017 ผลกระทบเชิงปริมาณในการตัดแต่งกิ่งบนสถาปัตยกรรมต้นมะกอกและประจำปี การเจริญเติบโตของหลังคาโดยใช้การสร้างแบบจำลอง 3 มิติบน UAV วิธีการปลูกพืช 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl'e, M., Comar, A., 2017 การประมาณค่าความหนาแน่นของต้นข้าวสาลีเมื่อโผล่ขึ้นมาจากภาพ UAV ที่ระดับความสูงต่ำมาก รีโมตเซ็น
สิ่งแวดล้อม. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019 ระบบตรวจสอบผลผลิตทางการเกษตรที่สนับสนุนโดยคลาวด์คอมพิวติ้ง คลัสเตอร์คอมพิวเตอร์. 22 (4), 8929–8938.
Ju, C., & Son, HI 2018ก. การประเมินประสิทธิภาพของระบบ UAV หลายระบบสำหรับการสำรวจระยะไกลในการเกษตร การประชุมเชิงปฏิบัติการเรื่อง Robotic Vision and Action in Agriculture ที่ IEEE International Conference on Robotics and Automation (ICRA), บริสเบน, ออสเตรเลีย, 21–26
Ju, C., Son, HI, 2018b. ระบบ UAV หลายระบบสำหรับการใช้งานด้านการเกษตร: การควบคุม การนำไปใช้ และการประเมิน อิเล็กทรอนิกส์ 7(9), 162. https://doi.org/10.3390/
อิเล็กทรอนิกส์7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021 ศักยภาพของการสำรวจระยะไกลและปัญญาประดิษฐ์เป็นเครื่องมือในการปรับปรุง
ความยืดหยุ่นของระบบการผลิตทางการเกษตร สกุลเงิน ความคิดเห็น เทคโนโลยีชีวภาพ 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. พ.ศ. 2019 เทคนิคการสอดแนมพืชที่ได้รับการปรับปรุงซึ่งรวมเอาการถ่ายภาพพืชหลายสเปกตรัมแบบหลายสเปกตรัมที่ไร้คนขับช่วยเข้ากับการสอดแนมแบบดั้งเดิมสำหรับโรคลำต้นเหนียวในแตงโม โรคพืช 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Neur, S. , 2018 ความก้าวหน้าในการวิจัยสื่อสังคมออนไลน์: อดีต ปัจจุบัน และอนาคต แจ้ง. ระบบ ด้านหน้า. 20
(3), 531-558
Kerkech, M. , Hafiane, A. , Canals, R. , 2020 VddNet: เครือข่ายการตรวจหาโรคเถาวัลย์ตามภาพหลายภาพและแผนที่ความลึก การสำรวจระยะไกล 12(20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019 การเปรียบเทียบภาพถ่ายหลายสเปกตรัมจากดาวเทียมและ UAV สำหรับไร่องุ่น
การประเมินความแปรปรวน การสำรวจระยะไกล 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020 IoT-blockchain เปิดใช้งานระบบแหล่งที่มาที่ปรับให้เหมาะสมสำหรับอุตสาหกรรมอาหาร 4.0 โดยใช้การเรียนรู้เชิงลึกขั้นสูง เซ็นเซอร์ 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021 การตรวจหาโรคพืชโดยใช้รูปภาพ: จากการเรียนรู้ของเครื่องแบบดั้งเดิมไปจนถึงการเรียนรู้เชิงลึก การสื่อสารไร้สาย คอมพิวเตอร์พกพา. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021 กรอบงานกึ่งกำกับดูแลแบบใหม่สำหรับการจำแนกพืช/วัชพืชตาม UAV กรุณาหนึ่ง 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. ภาพรวมของการประยุกต์ใช้ในปัจจุบันและศักยภาพของการสำรวจความร้อนจากระยะไกลในการเกษตรแบบแม่นยำ คอมพิวเตอร์ อิเล็กตรอน.
เกษตร. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019 วิวัฒนาการของ Internet of Things (IoT) และผลกระทบที่สำคัญในด้านเกษตรกรรมแม่นยำ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016 การมีส่วนร่วมของพนักงานสำหรับองค์กรที่ยั่งยืน: การวิเคราะห์คำหลักโดยใช้การวิเคราะห์เครือข่ายสังคมและระเบิด
วิธีการตรวจจับ ความยั่งยืน 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018 การบูรณาการ ของภาคพื้นดินและโดรน
วิธีการตรวจจับไฮเปอร์สเปกตรัมและโฟโตแกรมเมตริกสำหรับการทำแผนที่สำรวจและการตรวจสอบการทำเหมือง การสำรวจระยะไกล 10 (9), 1366 https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019 การนับต้นข้าวโพดโดยใช้การเรียนรู้เชิงลึกและภาพ UAV IEEE Geosci รีโมตเซ็นเซ. 1–5 https://doi.org/10.1109/LGRS.2019.2930549
Koh, JCO, Spangenberg, G., Kant, S. , 2021 การเรียนรู้ด้วยเครื่องอัตโนมัติสำหรับการสร้างฟีโนไทป์ของพืชด้วยภาพความเร็วสูง การสำรวจระยะไกล 13(5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020 แนวโน้มทางเทคโนโลยีสมัยใหม่ในการพัฒนาระบบนิเวศของ UAV ขนส่งสินค้า เจ. ฟิส. คอนเฟิร์ม เซอร์ 1515(5), 052068 https://อย. org/10.1088/1742-6596/1515/5/052068
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021 Visual SLAM สำหรับการปศุสัตว์ในร่มและการทำฟาร์มโดยใช้โดรนขนาดเล็กที่มีกล้องตาเดียว: การศึกษาความเป็นไปได้
โดรน 5(2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018 การสำรวจโดรนเพื่อการเกษตรอัตโนมัติ ตั้งแต่การปลูกจนถึง
เก็บเกี่ยว. ใน: INES 2018 – IEEE 22nd International Conference on Intelligent Engineering Systems, หน้า 000353–358 https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018 มุมมองและความท้าทายของเฟรมเวิร์ก UAV IoT: ต่อการปกป้องโดรนในฐานะ “สิ่งของ” เซนเซอร์ 18(11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. ขั้นตอนการประมวลผลภาพและการจำแนกประเภทสำหรับการวิเคราะห์ภาพขนาดต่ำกว่าเดซิเมตรที่ได้มาจากอากาศยานไร้คนขับในพื้นที่แห้งแล้ง
เรนจ์แลนด์ สกอ. รีโมตเซ็น 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. อากาศยานไร้คนขับสำหรับการทำแผนที่และการตรวจสอบพื้นที่: การเปรียบเทียบสองระบบ การประชุมประจำปีของ ASPRS
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021 เวิร์กโฟลว์โอเพ่นซอร์สสำหรับการทำแผนที่วัชพืชในทุ่งหญ้าพื้นเมือง
การใช้อากาศยานไร้คนขับ: การใช้ Rumex obtusifolius เป็นกรณีศึกษา เออ J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004 การยอมรับ การทำกำไร และการใช้ข้อมูลการทำฟาร์มที่แม่นยำยิ่งขึ้น
กระดาษรายงาน. มหาวิทยาลัยเพอร์ดู https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb´e, S., Baret, F., 2008 การประเมินภาพถ่ายทางอากาศไร้คนขับสำหรับการตรวจสอบปริมาณข้าวสาลีในแปลงขนาดเล็ก เซ็นเซอร์ 8 (5), 3557–3585 https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020 การออกแบบการเกษตรอัจฉริยะตามข้อมูลขนาดใหญ่และ Internet of Things ภายใน เจ. ดิสทริบิวเตอร์. ส.ว.สุทธิว. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016 การประมาณความสูงทรงพุ่มและมวลชีวภาพเหนือพื้นดินของข้าวโพดโดยใช้ภาพสเตอริโอความละเอียดสูงจากระยะไกล ระบบอากาศยานไร้คนขับต้นทุนต่ำ อีคอล. Ind. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018 การเรียนรู้ของเครื่องในการเกษตร: บทวิจารณ์ เซนเซอร์ 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. ระยะไกล ฟีโนไทป์ทางอากาศของลักษณะข้าวโพดด้วยวิธีมัลติเซนเซอร์แบบเคลื่อนที่ วิธีการปลูก 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020 การตรวจจับและนับข้าวฟ่างข้าวฟ่างโดยใช้ภาพระบบทางอากาศไร้คนขับและการเรียนรู้เชิงลึก ด้านหน้า. วิทย์พืช. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019 ระบบตรวจสอบ Internet of Things ของการเกษตรเชิงนิเวศสมัยใหม่บนพื้นฐานการประมวลผลแบบคลาวด์ การเข้าถึง IEEE 7, 37050–37058
Lopez-Granados, ´ F., 2011. การตรวจจับวัชพืชสำหรับการจัดการวัชพืชเฉพาะพื้นที่: การทำแผนที่และแนวทางแบบเรียลไทม์ วัชพืช Res 51(1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P'erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. การเฝ้าติดตามต้นหญ้าในต้นหญ้าโดยใช้วัตถุโดยใช้ภาพถ่าย UAV ความละเอียดสูง อากร. ยังชีพประคับประคอง. การพัฒนา 36 (4), 1–12
Lopez-Granados, ´ F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016 การทำแผนที่วัชพืชต้นฤดูในทานตะวันโดยใช้เทคโนโลยี UAV: ความแปรปรวนของแผนที่การบำบัดสารกำจัดวัชพืชเทียบกับเกณฑ์กำจัดวัชพืช แม่นยำ เกษตร. 17(2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014 HyperUAS – การถ่ายภาพด้วยสเปกโทรสโกปีจากระบบอากาศยานไร้คนขับหลายใบพัด เจ ฟิลด์ ร็อบ 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. การสแกนด้วยเลเซอร์ภาคพื้นดินของ พืชผลทางการเกษตร ในเจ.เจ
เฉิน เจ. มาส เอช–จี (เอ็ด), หอจดหมายเหตุระหว่างประเทศของโฟโตแกรมเมทรี, การสำรวจระยะไกลและวิทยาศาสตร์ข้อมูลเชิงพื้นที่—หอจดหมายเหตุ ISPRS (ฉบับที่ 37, หน้า 563–566)
International Society for Photogrammetry และ Remote Sensing https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017 การทบทวนการจัดประเภทภาพบนบกตามวัตถุภายใต้การดูแล ISPRS J. โฟโตแกรม รีโมตเซ็น 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019 มุมมองสำหรับการสำรวจระยะไกลด้วยยานพาหนะทางอากาศไร้คนขับในการเกษตรแบบแม่นยำ แนวโน้มพืชวิทย์. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017
ฟีโนไทป์ของถั่วเหลืองตามระบบไร้คนขับ (UAS) โดยใช้การรวมข้อมูลหลายเซ็นเซอร์และเครื่องการเรียนรู้ขั้นสูง ISPRS J. โฟโตแกรม รีโมตเซ็น 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020
การตรวจสอบพืชผลโดยใช้การรวมข้อมูลดาวเทียม/UAV และการเรียนรู้ของเครื่อง การสำรวจระยะไกล 12 (9), 1357 https://doi.org/10.3390/rs12091357
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P'erez, G., Su, Z., Vico, G., Toth , พ., 2018. ว่าด้วยการใช้ระบบเสาอากาศไร้คนขับสำหรับ
การตรวจสอบด้านสิ่งแวดล้อม การสำรวจระยะไกล 10 (4), 641.
Marinko, RA, 1998. Citations to women's Studies Journals in dissertations, 1989 and The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021 การจัดการทรัพยากรในเครือข่ายไร้สายที่ใช้ UAV: มุมมองของการเพิ่มประสิทธิภาพ เครือข่ายเฉพาะกิจ 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018 การใช้งานจริงของแพลตฟอร์ม UAV แบบหลายเซ็นเซอร์โดยอาศัยภาพความละเอียดสูงแบบหลายสเปกตรัม ความร้อน และ RGB อย่างแม่นยำ
การปลูกองุ่น เกษตร 8(7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021 ก้าวข้ามดัชนี NDVI แบบดั้งเดิมในฐานะปัจจัยสำคัญสู่กระแสหลักในการใช้ UAV ในการปลูกองุ่นที่แม่นยำ วิทย์ ตัวแทน 11 (1), 2721 https://doi.org/10.1038/s41598-021-81652-3
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 . การเปรียบเทียบระหว่าง UAV, เครื่องบิน
และแพลตฟอร์มการสำรวจระยะไกลผ่านดาวเทียมสำหรับการปลูกองุ่นอย่างแม่นยำ การสำรวจระยะไกล 7 (3), 2971–2990 https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020 UAV และการปรับแต่งตามการเรียนรู้ของเครื่องของดัชนีพืชพรรณที่ขับเคลื่อนด้วยดาวเทียมเพื่อความแม่นยำ
เกษตรกรรม. เซ็นเซอร์ 20(9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990 การทำแผนที่ผู้เขียนในพื้นที่ทางปัญญา: ภาพรวมทางเทคนิค แยม. สังคม ข้อมูล. วิทย์ 41(6), 433–443.
Meinen, BU, Robinson, DT, 2021 การสร้างแบบจำลองการกัดเซาะทางการเกษตร: การประเมินค่าประมาณการกัดเซาะในระดับภาคสนามของ USLE และ WEPP โดยใช้ข้อมูลอนุกรมเวลาของ UAV สิ่งแวดล้อม. โมเดล ซอฟต์แวร์ 137, 104962 https://doi.org/10.1016/j.envsoft.2021.104962
Melville, B., Lucieer, A., Aryal, J., 2019 การจำแนกประเภทของชุมชนทุ่งหญ้าพื้นเมืองที่ลุ่มโดยใช้ภาพถ่ายระบบอากาศยานไร้คนขับแบบไฮเปอร์สเปกตรัม (UAS) ใน
แทสมาเนียมิดแลนด์ โดรน 3 (1), 5.
เมสซีนา, G., Modica, G., 2020 การประยุกต์ใช้ภาพถ่ายความร้อน UAV ในการเกษตรที่แม่นยำ: ล้ำสมัยและแนวโน้มการวิจัยในอนาคต การสำรวจระยะไกล 12 (9), https://doi.org/10.3390/rs12091491
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017 การศึกษาบรรณานุกรมเกี่ยวกับข้อมูลขนาดใหญ่: แนวคิด แนวโน้ม และความท้าทาย การจัดการกระบวนการทางธุรกิจ ญ. 23 (3),
555-573
Mochida, K., Saisho, D., Hirayama, T., 2015. การปรับปรุงพืชผลโดยใช้ชุดข้อมูลวัฏจักรชีวิตที่ได้มาภายใต้สภาพพื้นที่เพาะปลูก ด้านหน้า. วิทย์พืช. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018 ทบทวนการประยุกต์ใช้ระบบโดรนในการเกษตรแม่นยำ โพรซีเดียคอมพิวเตอร์ วิทย์ 133, 502–509.
Moharana, S., Dutta, S., 2016 ความแปรปรวนเชิงพื้นที่ของคลอโรฟิลล์และปริมาณไนโตรเจนในข้าวจากภาพถ่ายไฮเปอร์สเปกตรัม ISPRS J. โฟโตแกรม รีโมตเซ็น 122, 17–29.
เมืองประทุน, เจ, บุญนำ, น., ขจรกษิราช, ส. เล็กบางพงษ์, น., วานิชสมบัติ, อ.,
Nillaor, P., 2019 IoT และการวิเคราะห์ข้อมูลการเกษตรสำหรับฟาร์มอัจฉริยะ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 156, 467–474.
Nansen, C. , Elliott, N. , 2016 การสำรวจระยะไกลและการทำโปรไฟล์การสะท้อนแสงในกีฏวิทยา แอนนู รายได้ Entomol 61(1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016 การทำแผนที่หลายสเปกตรัมในการเกษตร: โมเสกภูมิประเทศโดยใช้ UAV Quadcopter ที่เป็นอิสระ ภายใน คอนเฟิร์ม
ระบบอากาศยานไร้คนขับ (ไอซียูเอ) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020 อินเทอร์เน็ตของโดรน (Iodt): ภาพอนาคตของโดรนอัจฉริยะ ผู้ช่วย อินเทล. ระบบ คอมพิวเตอร์ 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008 เซ็นเซอร์มัลติสเปกตรัมน้ำหนักเบาสำหรับ UAV ขนาดเล็ก ซึ่งเป็นโอกาสสำหรับการสำรวจระยะไกลทางอากาศที่มีความละเอียดสูงมาก ภายใน โค้ง. โฟโต้แกรมม. รีโมท Sens. Spat. รายละเอียด วิทย์ 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019 แอปพลิเคชั่น UAV ที่เกิดขึ้นใหม่ในการเกษตร ใน: 2019 การประชุมนานาชาติด้านเทคโนโลยี Robot Intelligence ครั้งที่ 7 และ
แอปพลิเคชัน (RiTA), หน้า 254–257 https://doi.org/10.1109/RITAPP.2019.8932853.
Neur, SP, Rasheed, AA, Natarajan, V. , 2008 โครงสร้างทางปัญญาของสาขาการจัดการเชิงกลยุทธ์: การวิเคราะห์ผู้เขียนร่วม กลยุทธ์ จัดการ ญ. 29 (3),
319-336
Neupane, K., Baysal-Gurel, F., 2021 การระบุและติดตามโรคพืชโดยอัตโนมัติโดยใช้อากาศยานไร้คนขับ: การทบทวน การสำรวจระยะไกล 13 (19), 3841 https://doi.org/10.3390/rs13193841
Nex, F., Remondino, F., 2014 UAV สำหรับแอปพลิเคชันการทำแผนที่ 3 มิติ: บทวิจารณ์ แอป เรขาคณิต 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H. , Hollenbeck, D. , Zhao, T. , Wang, D. , Chen, Y. , 2020 การประมาณการระเหยของไอระเหยด้วย UAV ขนาดเล็กในการเกษตรแบบแม่นยำ เซ็นเซอร์ 20 (22), 6427 https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrics, Citation Analysis and Co-Citation Analysis. การทบทวนวรรณกรรม 46 3 (149), 158–10.1515. https://doi.org/1996.46.3.149/libr.XNUMX.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017 UAS เซนเซอร์ และการประมวลผลข้อมูลในวนเกษตร: การทบทวนการใช้งานจริง ภายใน J. Remote Sens. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, US, Pratihast, AK, Aryal, J., Kayastha, RB, 2020 การทบทวนโซลูชันข้อมูลที่ใช้โดรนสำหรับพืชผลธัญญาหาร โดรน 4 (3), 1–29. https://doi.org/10.3390/
โดรน4030041.
Parsaeian, M. , Shahabi, M. , Hassanpour, H. , 2020 การประมาณปริมาณน้ำมันและโปรตีนของเมล็ดงาโดยใช้การประมวลผลภาพและโครงข่ายประสาทเทียม แยม. น้ำมัน
สมาคมนักเคมี 97(7), 691–702.
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., การทำแผนที่วัชพืชในไร่ข้าวโพดต้นฤดูโดยใช้การวิเคราะห์ตามวัตถุ ของ
ภาพถ่ายอากาศยานไร้คนขับ (UAV) กรุณาหนึ่ง 8 (10), e77151
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
Lopez-Granados, ´ F., 2015. ระบบกึ่งควบคุมสำหรับการทำแผนที่วัชพืชในพืชทานตะวันโดยใช้ยานพาหนะทางอากาศไร้คนขับและวิธีการตรวจหาแถวพืชผล แอป ซอฟท์คอมพิวเตอร์. ญ. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021 อุปกรณ์ IoT ที่คุ้มราคาเป็นแหล่งข้อมูลที่เชื่อถือได้สำหรับระบบการจัดการน้ำบนบล็อกเชนในการเกษตรแบบแม่นยำ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020 ระบบ UAV–WSN ขั้นสูงสำหรับการตรวจสอบอัจฉริยะในการเกษตรแบบแม่นยำ เซ็นเซอร์ 20 (3), https://doi.org/10.3390/s20030817
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020 การประยุกต์ใช้บล็อกเชนในห่วงโซ่อุปทาน การขนส่งและโลจิสติกส์: การทบทวนวรรณกรรมอย่างเป็นระบบ ภายใน เจ. โปรดัก. ความละเอียด 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012 ยานพาหนะทางอากาศไร้คนขับที่ยืดหยุ่นสำหรับการเกษตรแม่นยำ
แม่นยำ เกษตร. 13(4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969 บรรณานุกรมทางสถิติหรือบรรณานุกรม เอกสารเจ. 25(4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012 ความเหมาะสมของอากาศยานไร้คนขับ (UAV) สำหรับการประเมินพื้นที่ทดลองและพืชผล เกษตรกรรม 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017 โดรนเพื่อการเกษตร: ความก้าวหน้าครั้งใหม่ในด้านการเกษตรที่แม่นยำ เจ.สเตตัส. จัดการ ระบบ 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020 การรวบรวมแอปพลิเคชัน UAV สำหรับการเกษตรแบบแม่นยำ คอมพิวเตอร์ เน็ต 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020 การประยุกต์ใช้การวิเคราะห์ข้อมูลขนาดใหญ่และปัญญาประดิษฐ์ในการวิจัยพืชไร่ Indian J. Agron 65(4), 383–395.
Raparelli, E., Bajocco, S., 2019 การวิเคราะห์บรรณานุกรมเกี่ยวกับการใช้ยานพาหนะทางอากาศไร้คนขับในการศึกษาด้านการเกษตรและป่าไม้ ภายใน J. รีโมตเซ็น 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013
การใช้ศักยภาพของระบบอากาศยานไร้คนขับขนาดเล็ก (UAS) ในการวิจัยวัชพืช วัชพืช Res 53(4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., เป็นดัชนีพืชพรรณที่ได้มาจากกล้องระดับผู้บริโภคที่ติดตั้งบน
UAVs น่าเชื่อถือเพียงพอสำหรับการประเมินแปลงทดลองหรือไม่? เออ เจ. แอกรอน. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022 การทำให้เป็นดิจิทัลในห่วงโซ่อุปทานอาหาร: การทบทวนบรรณานุกรมและเส้นทางหลักของเส้นทางหลัก
การวิเคราะห์. ความยั่งยืน 14(1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a โดรนสำหรับการจัดการห่วงโซ่อุปทานและโลจิสติกส์: วาระการทบทวนและการวิจัย ภายใน เจ. โลจิสติก. ความละเอียด แอป
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. เทคโนโลยีบล็อคเชนในการจัดการโลจิสติกส์และซัพพลายเชน: การทบทวนบรรณานุกรม โลจิสติกส์ 5(4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. โดรนเพื่อมนุษยธรรม: วาระการทบทวนและการวิจัย อินเทอร์เน็ตของสรรพสิ่ง 16, 100434 https://doi.org/10.1016/j
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. การวิจัยบล็อกเชนในการดูแลสุขภาพ: การทบทวนบรรณานุกรมและแนวโน้มการวิจัยในปัจจุบัน J. จาก Data, Inf. และ
จัดการ 3(2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020 การวิจัย Internet of Things ในการจัดการห่วงโซ่อุปทานและโลจิสติกส์: การวิเคราะห์บรรณานุกรม อินเทอร์เน็ต
ของสิ่งที่ 12, 100318.
ReportLinker, 2021 ตลาดโดรนเพื่อการเกษตรทั่วโลกจะสูงถึง 15.2 พันล้านเหรียญสหรัฐภายในปีนี้GlobeNewswire News Room https://www.globenewswire.com/news-release/2021/08/10/2277986/0/th/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- ปี-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017 การสอบเทียบกล้องความร้อนที่ไม่มีการระบายความร้อนและการเพิ่มประสิทธิภาพของ
กระบวนการโฟโตแกรมเมตรีสำหรับการใช้งาน UAV ในการเกษตร เซนเซอร์ (สวิตเซอร์แลนด์) 17 (10) https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. ความก้าวหน้าในการวิจัยการบริการ: “จาก Rodney Dangerfield ถึง Aretha Franklin” ภายใน เจ. ร่วมสมัย. โรงพยาบาล. จัดการ 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015 ระบบประสาทสัมผัสที่ใช้ Mini-UAV สำหรับการวัดตัวแปรด้านสิ่งแวดล้อมในโรงเรือน เซนเซอร์ 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021 UAV ระดับผู้บริโภคใช้สำหรับตรวจจับและวิเคราะห์รูปแบบการกระจายเชิงพื้นที่ของวัชพืชช่วงปลายฤดูในไร่หัวหอมเชิงพาณิชย์ แม่นยำ เกษตร. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H. , Pellikka, I. , Pesonen, L. , Tuominen, S. , Heikkila, ¨ J. , Holmlund, C. , Makynen, ¨ J. , Ojala, K. , Antila, T. , 2011 กำลังใจ ยานพาหนะทางอากาศ (UAV) ใช้งานระบบกล้องสเปกตรัมสำหรับการใช้งานด้านป่าไม้และการเกษตร ดำเนินการ. SPIE – อินเตอร์ สังคม เลือก. อังกฤษ 8174 https://doi.org/10.1117/12.897585.
Sah, B. , Gupta, R. , Bani-Hani, D. , 2021 การวิเคราะห์อุปสรรคในการดำเนินการด้านโลจิสติกส์ด้วยโดรน ภายใน เจ. โลจิสติก. ความละเอียด แอป 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, โดรนที่ใช้ IOT สำหรับการปรับปรุงคุณภาพพืชผลในแปลงเกษตร ใน SH
N. Chakrabarti S. (บรรณาธิการ), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-January, pp. 612–615) สถาบัน
ของ Electrical and Electronics Engineers Inc. ดอย: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019 LEDCOM: การสื่อสารที่ใช้ LED แบบใหม่และมีประสิทธิภาพสำหรับการเกษตรแบบแม่นยำ การประชุม IEEE ข้อมูล. ชุมชน เทคโนโลยี 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E. , Barrado, C. , Pastor, E. , 2014 การทดลองบินด้วย UAV ใช้กับการรับรู้ระยะไกลของพื้นที่เพาะปลูก การสำรวจระยะไกล 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015
ระบบภาพถ่ายทางอากาศที่มีระดับความสูงต่ำและความละเอียดสูงสำหรับฟีโนไทป์ของพืชไร่และพืชไร่: บทวิจารณ์ เออ เจ. แอกรอน. 70, 112–123. https://doi.org/10.1016/j.
อีจา.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017 การถ่ายภาพความร้อนที่ใช้ UAV ความละเอียดสูงเพื่อประเมิน
การเปลี่ยนแปลงทันทีและตามฤดูกาลของสถานะน้ำของพืชภายในไร่องุ่น เกษตร. การจัดการน้ำ 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010 นอกเหนือจากการวิเคราะห์การอ้างอิง: แบบจำลองสำหรับการประเมินผลกระทบของการวิจัย เจ เมด สำนักหอสมุด รศ. : ม.ป.ช. 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009 วิทยาศาสตร์ระบบโลกที่เกี่ยวข้องกับการถ่ายภาพสเปกโทรสโกปี—การประเมิน รีโมท Sens. สิ่งแวดล้อม. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016 การตรวจสอบพารามิเตอร์ทางการเกษตรของพืชข้าวสาลีฤดูหนาวด้วย UAV ที่มีต้นทุนต่ำ
ภาพ การสำรวจระยะไกล 8 (9) https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008 การพัฒนาและการประยุกต์ใช้ยานพาหนะทางอากาศไร้คนขับอัตโนมัติสำหรับการสุ่มตัวอย่างทางอากาศที่แม่นยำข้างต้น
เขตเกษตรกรรม เจ ฟิลด์ ร็อบ 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D. , Menshchikov, A. , Somov, A. , Bornemann, G. , Hauslage, J. , Fedorov, M. ,
เปิดใช้งานการเกษตรที่แม่นยำผ่านการตรวจจับแบบฝังตัวด้วยปัญญาประดิษฐ์ IEEE ทรานส์ เครื่องดนตรี วัด 69(7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019 Unmanned Aerial Vehicles (UAVs): การสำรวจเกี่ยวกับการใช้งานพลเรือนและความท้าทายด้านการวิจัยที่สำคัญ การเข้าถึง IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019 เกษตรกรรมที่ขับเคลื่อนด้วยข้อมูลขนาดใหญ่: การวิเคราะห์ข้อมูลขนาดใหญ่ในการปรับปรุงพันธุ์พืช จีโนม และการใช้การสำรวจระยะไกล
เทคโนโลยีเพื่อเพิ่มผลผลิตพืชผล ปรากฏการณ์พืช J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019 การวิเคราะห์เปรียบเทียบและนัยของ UAV และ AI ในการสืบสวนทางนิติวิทยาศาสตร์ ใน: การดำเนินการ – 2019 Amity International
การประชุมวิชาการปัญญาประดิษฐ์. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022 บทบาทของปัญญาประดิษฐ์ในการจัดการห่วงโซ่อุปทาน: การทำแผนที่อาณาเขต ภายใน เจ
แยง. ความละเอียด 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan ,เอ็มวี,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016 ยานพาหนะทางอากาศไร้คนขับสำหรับฟีโนไทป์ปริมาณงานสูงและการวิจัยพืชไร่ กรุณาหนึ่ง
11(7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019 การจับข้าวโพดยืนหยัดในความหลากหลายทั่วทั้งเขตเสถียรภาพผลผลิตโดยใช้อากาศยานไร้คนขับ
ยานพาหนะ (UAV) เซ็นเซอร์ 19 (20), 4446 https://doi.org/10.3390/s19204446
Small, H. , 1973. การอ้างอิงร่วมในวรรณกรรมทางวิทยาศาสตร์: มาตรการใหม่ของความสัมพันธ์ระหว่างเอกสารสองฉบับ แยม. สังคม ข้อมูล. วิทย์ 24(4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999 การแสดงภาพวิทยาศาสตร์โดยการทำแผนที่อ้างอิง แยม. สังคม ข้อมูล. วิทย์ 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021 การนับวัวในป่าด้วยภาพถ่ายทางอากาศระบุตำแหน่งทางภูมิศาสตร์ในพื้นที่ทุ่งหญ้าขนาดใหญ่ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020 แนวทางสำหรับการปรับเส้นทางให้เหมาะสมในการใช้งานเกษตรแม่นยำโดยใช้ UAV โดรน 4(3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000 การนำเกษตรแม่นยำมาใช้ในศตวรรษที่ 21 เจ. อกริก. อังกฤษ ความละเอียด 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018 การประเมินความแห้งแล้งของข้าวสาลีโดยการสำรวจระยะไกลโดยใช้ยานพาหนะทางอากาศไร้คนขับ ในปี 2018 การประชุมการควบคุมของจีนครั้งที่ 37 (CCC)
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018 การตรวจสอบสนิมสีเหลืองของข้าวสาลีโดยการเรียนรู้จากภาพถ่ายทางอากาศ UAV แบบหลายสเปกตรัม
คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021 นวัตกรรมการจัดการเศรษฐกิจการเกษตรในกระบวนการสร้างเกษตรกรรมอัจฉริยะด้วยข้อมูลขนาดใหญ่ คอมพิวเตอร์ที่ยั่งยืน รายละเอียด ระบบ 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007 การประเมินความไวของระบบเสาอากาศอินฟราเรดความร้อนไร้คนขับเพื่อตรวจจับความเครียดของน้ำในหลังคาฝ้าย ทรานส์ ASABE 50 (6), 1955-1962
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. การบูรณาการของดัชนีพืชพรรณตาม RGB, แบบจำลองพื้นผิวพืชผลและวิธีการวิเคราะห์ภาพตามวัตถุสำหรับการประมาณผลผลิตอ้อยโดยใช้ยานพาหนะทางอากาศไร้คนขับ คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013 ระบบการทำแผนที่ไฮเปอร์สเปกตรัมน้ำหนักเบาสำหรับ
อากาศยานไร้คนขับ—ผลลัพธ์แรก ใน: 2013 การประชุมเชิงปฏิบัติการครั้งที่ 5 เรื่อง Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), หน้า 1–4 https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014 ไฮเปอร์สเปกตรัมที่มีน้ำหนักเบา
ระบบแผนที่และห่วงโซ่การประมวลผลโฟโตแกรมเมตริกสำหรับอากาศยานไร้คนขับ การสำรวจระยะไกล 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021 กลยุทธ์การควบคุมขั้นสูงโดยใช้การประมวลผลภาพ UAV และ AI ในภาคการเกษตร: บทวิจารณ์ เวิลด์ เจ. อิง. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998 การประมวลผลข้อมูลโดยใช้การอ้างอิงเพื่อตรวจสอบอิทธิพลของวารสารทางการบัญชี รายละเอียด กระบวนการ. จัดการ. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021 การสำรวจเครือข่าย 5G และผลกระทบต่อการเกษตร: ความท้าทายและโอกาส คอมพิวเตอร์
อิเล็กตรอน. เกษตร. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019 การตัดสินใจที่ขับเคลื่อนด้วยข้อมูลในการเกษตรแม่นยำ: การเพิ่มขึ้นของข้อมูลขนาดใหญ่ในระบบการเกษตร เจ. อกริก. ข้อมูลอาหาร
20 (4), 344–380
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020 การประมาณผลผลิตและความสูงของต้นข้าวสาลีฤดูหนาวโดยใช้ UAV- ตามภาพไฮเปอร์สเปกตรัม
เซนเซอร์ 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010 ประสานงานการสุ่มตัวอย่างทางอากาศของเชื้อโรคพืชในชั้นบรรยากาศด้านล่างโดยใช้ยานพาหนะทางอากาศไร้คนขับสองลำ เจ ฟิลด์ ร็อบ 27(3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020 การตรวจหาและการจำแนกศัตรูพืชถั่วเหลืองโดยใช้การเรียนรู้เชิงลึก
ด้วยภาพ UAV คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013 การใช้ Uas สำหรับการประเมินระบบการเกษตรในพื้นที่ชุ่มน้ำในแทนซาเนียใน— และ WetSeason เพื่อการเกษตรที่ยั่งยืนและให้ความจริงพื้นฐานสำหรับข้อมูล Terra-Sar X ใน: ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, pp. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M. , 2008 Bibliometrics เป็น Webometrics ข้อมูลเจ วิทย์ 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015 วิธีการอัตโนมัติที่ใช้วัตถุสำหรับการกำหนดเกณฑ์ที่เหมาะสมที่สุดในภาพ UAV: แอปพลิเคชันสำหรับการตรวจจับพืชในพืชล้มลุก คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015 การตรวจสอบ 3 มิติปริมาณงานสูงของการปลูกต้นไม้เพื่อการเกษตรด้วย เทคโนโลยีอากาศยานไร้คนขับ (UAV) กรุณาหนึ่ง 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014 การทำแผนที่แบบหลายช่วงเวลาของเศษพืชในทุ่งข้าวสาลีต้นฤดูโดยใช้ภาพจาก UAV คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019 การทบทวนการใช้งานที่ใช้ UAV สำหรับการเกษตรแม่นยำ ข้อมูล (สวิตเซอร์แลนด์) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020 การปรับการวางแผนการบินของโดรนให้เหมาะสมสำหรับการวัดโครงสร้างการปลูกพืชสวน ISPRS J. โฟโตแกรม
รีโมตเซ็น 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017 Internet of Things ในการเกษตร ความก้าวหน้าล่าสุดและความท้าทายในอนาคต ไบโอซิส อังกฤษ 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015 การทำแผนที่ Scientometric ของการวิจัยวิทยาการคอมพิวเตอร์ในเม็กซิโก ไซเอนโทเมตริกส์ 105 (1), 97–114.
UN., 2019. แนวโน้มประชากรโลก 2019. https://population.un.org/wpp/ (เข้าถึงเมื่อ 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. ลักษณะของนาข้าวโดยระบบเซ็นเซอร์ไฮเปอร์สเปกตรัมขนาดเล็กที่ติดตั้ง UAV IEEE J. เซล สูงสุด. แอป Earth Obs.
รีโมตเซ็น 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, ราคา, KP, Sharda, A., 2020 โดรนใน
เกษตรกรรม. ผู้ช่วย อากร. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022
อากาศยานไร้คนขับ (UAV) ในการเกษตรแม่นยำ: การใช้งานและความท้าทาย พลังงาน 15(1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018 การทำแผนที่และการจำแนกแหล่งที่อยู่อาศัยทางทะเลที่อ่อนไหวต่อระบบนิเวศโดยใช้อากาศยานไร้คนขับ
ภาพถ่ายยานพาหนะ (UAV) และการวิเคราะห์ภาพตามวัตถุ (OBIA) การสำรวจระยะไกล 10 (9), 1331 https://doi.org/10.3390/rs10091331
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014 ดัชนีพื้นที่สีเขียวจากระบบทางอากาศไร้คนขับเหนือข้าวสาลีและพืชเรพซีด . รีโมท Sens. สิ่งแวดล้อม. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015 การติดตั้งเซ็นเซอร์ที่ใช้ UAV แบบออปติคอลสี่ตัวเหนือทุ่งหญ้า: ความท้าทายและ
ข้อ จำกัด ชีวธรณีศาสตร์ 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018 อินเทอร์เน็ตของสิ่งใต้ดินในการเกษตรแม่นยำ: ด้านสถาปัตยกรรมและเทคโนโลยี เครือข่ายเฉพาะกิจ 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021 ปัญญาประดิษฐ์ที่มีความรับผิดชอบในฐานะส่วนผสมลับสำหรับสุขภาพดิจิทัล: การวิเคราะห์บรรณานุกรม ข้อมูลเชิงลึก และทิศทางการวิจัย
ข้อมูล. ระบบ ด้านหน้า. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019 การวิเคราะห์บรรณานุกรมของแนวโน้มการวิจัยการสำรวจระยะไกลในการตรวจสอบการเจริญเติบโตของพืช: กรณีศึกษาในประเทศจีน การสำรวจระยะไกล 11 (7). https://doi.org/10.3390/rs11070809.
White, HD, Griffith, BC, 1981. Author cocitation: การวัดวรรณกรรมเกี่ยวกับโครงสร้างทางปัญญา แยม. สังคม ข้อมูล. วิทย์ 32 (3), 163–171.
Xiang, H., Tian, L., 2011. การพัฒนาระบบสำรวจระยะไกลเพื่อการเกษตรต้นทุนต่ำโดยใช้อากาศยานไร้คนขับ (UAV) ไบโอซิส อังกฤษ 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020 การทบทวนลักษณะฟีโนไทป์ของโรงงานที่ให้ปริมาณงานสูงโดยใช้เซ็นเซอร์ที่ใช้ UAV คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 178, 105731 https://doi.org/10.1016/j
คอมแพค.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. อากาศยานไร้คนขับสำหรับการใช้งานการสำรวจระยะไกล—บทวิจารณ์ การสำรวจระยะไกล 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021 การย้ายการติดตามผู้คนและการลบแทร็กที่ผิดพลาดด้วยการถ่ายภาพความร้อนอินฟราเรดโดยมัลติโรเตอร์ โดรน 5(3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018 การเปรียบเทียบการประมาณค่าพารามิเตอร์ครอบตัดโดยใช้รูปภาพ จากการติดตั้ง UAV
เซ็นเซอร์ไฮเปอร์สเปกตรัมแบบ snapshot และกล้องดิจิตอลความละเอียดสูง การสำรวจระยะไกล 10 (7), 1138 https://doi.org/10.3390/rs10071138
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017 การประมาณค่ามวลชีวภาพเหนือพื้นดินของข้าวสาลีฤดูหนาวโดยใช้อากาศยานไร้คนขับ- ตามภาพรวม
เซ็นเซอร์ไฮเปอร์สเปกตรัมและรุ่นปรับปรุงความสูงของพืช การสำรวจระยะไกล 9 (7) https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015 การใช้อากาศยานไร้คนขับน้ำหนักเบาเพื่อตรวจสอบการฟื้นตัวของป่าเขตร้อน ไบโอล
อนุรักษ์. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019
แพลตฟอร์ม IoT การทำฟาร์มอัจฉริยะที่อิงตามขอบและคลาวด์คอมพิวติ้ง ไบโอซิส อังกฤษ 177,
4-17
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014 การวัดความสูงของต้นไม้โดยใช้ภาพความละเอียดสูงมากที่ได้มาจากเสาอากาศไร้คนขับ
ยานพาหนะ (UAV) และวิธีการสร้างภาพ 3 มิติใหม่โดยอัตโนมัติ เออ เจ. แอกรอน. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020 ฟีโนไทป์ตามภาพสำหรับความเข้มของการออกดอกในพืชฤดูหนาว เซนเซอร์ 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012 การประยุกต์ใช้ระบบทางอากาศไร้คนขับขนาดเล็กสำหรับการเกษตรที่แม่นยำ: การทบทวน แม่นยำ เกษตร. 13(6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019 การทำแผนที่ความเครียดของน้ำในข้าวโพดโดยอิงจากการสำรวจระยะไกลหลายสเปกตรัมของ UAV การสำรวจระยะไกล 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , ต., 2019 แนวทางการเรียนรู้เชิงลึกสำหรับสนิมเหลืองอัตโนมัติ
การตรวจจับโรคจากภาพ UAV แบบไฮเปอร์สเปกตรัมที่มีความละเอียดสูง การสำรวจระยะไกล 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022 การตรวจจับและการเลือกปฏิบัติของโรคและความเครียดจากแมลงของต้นชาโดยใช้การถ่ายภาพไฮเปอร์สเปกตรัมร่วมกับการวิเคราะห์เวฟเล็ต คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. เอนโทรปีแนะนำการปรับโดเมนฝ่ายตรงข้ามสำหรับการแบ่งส่วนความหมายของภาพถ่ายทางอากาศ IEEE ทรานส์ ช
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016 การตรวจจับฟีโนโลจีของข้าวผ่านการวิเคราะห์อนุกรมเวลาของสเปกตรัมบนพื้นดิน ข้อมูลดัชนี พืชไร่ Res 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018 การออกแบบระบบการเพาะเมล็ดรั่วไหลเพื่อการเกษตรที่มีความแม่นยำโดยใช้เซ็นเซอร์ไร้สาย ภายใน เจ ออนไลน์ อิงค์ 14(05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020 การวิเคราะห์การเปลี่ยนแปลงความสูงของพืชของข้าวโพดที่ค้างโดยใช้ข้อมูล UAV-LiDAR เกษตร 10(5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021 Maize-IAS: ซอฟต์แวร์วิเคราะห์ภาพข้าวโพดโดยใช้การเรียนรู้เชิงลึกสำหรับฟีโนไทป์ของพืชที่ให้ปริมาณงานสูง . วิธีการปลูก 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017 การทำนายผลผลิตธัญพืชใน ข้าวโดยใช้พืชหลายช่วงเวลา
ดัชนีจากภาพมัลติสเปกตรัมและภาพดิจิทัลที่ใช้ UAV ISPRS J. โฟโตแกรม รีโมตเซ็น 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016 การจำลองเทคโนโลยีหลักของระบบตรวจสอบเรือนกระจกตามเครือข่ายเซ็นเซอร์ไร้สาย ภายใน เจ ออนไลน์ อิงค์ 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021 การประเมินความเครียดของน้ำในการเพาะปลูกด้วยภาพถ่ายความร้อนอินฟราเรดในการเกษตรแบบแม่นยำ: การทบทวน
และโอกาสในอนาคตสำหรับแอปพลิเคชันการเรียนรู้เชิงลึก คอมพิวเตอร์ อิเล็กตรอน. เกษตร. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}