































ผู้ชนะโดยรวม: ทีม Bullseye จาก Wageningen University ประเทศเนเธอร์แลนด์; งานฟรีสไตล์ด้วยแนวคิดที่มีวิสัยทัศน์ การจำลองภาคสนามพิสูจน์ความท้าทายด้วยประโยชน์การเรียนรู้ที่ยอดเยี่ยม ผู้ชมจากต่างประเทศมากกว่า 500 คนออนไลน์ในสามวัน
(DLG) จับมือ DLG Feldtage และปีนี้จัดในรูปแบบเสมือนจริงบนแพลตฟอร์มดิจิทัลของ DLG เป็นครั้งแรก งาน Field Robot Event ครั้งที่ 18 การประกวดหุ่นยนต์ภาคสนามสำหรับทีมนักศึกษาต่างชาติ ผู้ชนะนำเสนอโดยผู้จัดงาน Hohenheim University และ Wageningen University ผู้ชนะโดยรวมของการแข่งขันปี 2021 คือทีม Bullseye จากมหาวิทยาลัย Wageningen ประเทศเนเธอร์แลนด์ ซึ่งได้รับการตัดสินจากผลงานภาคสนามสี่ชุด ซึ่งรวมถึงการนำทางในแถวข้าวโพดโค้ง แถวตรงที่มีหรือไม่มีต้นไม้ การรับรู้วัชพืช และขยะ และต่อมาได้รื้อถอนที่หัวแหลม งานฟรีสไตล์ซึ่งเป็นงานทางเลือกที่ช่วยให้ทีมนักเรียนได้อวดความสามารถทางวิศวกรรมของตนเองในการแก้ปัญหางานเกษตรกรรมที่เลือกเองได้ ได้รับรางวัลโดยทีม Ceres มหาวิทยาลัยวิทยาศาสตร์ประยุกต์ Münster ด้วยหุ่นยนต์เก็บเกี่ยวที่สามารถตรวจจับและหยิบฟักทองได้ .
ผู้ชมจากต่างประเทศ 518 คนรับชม
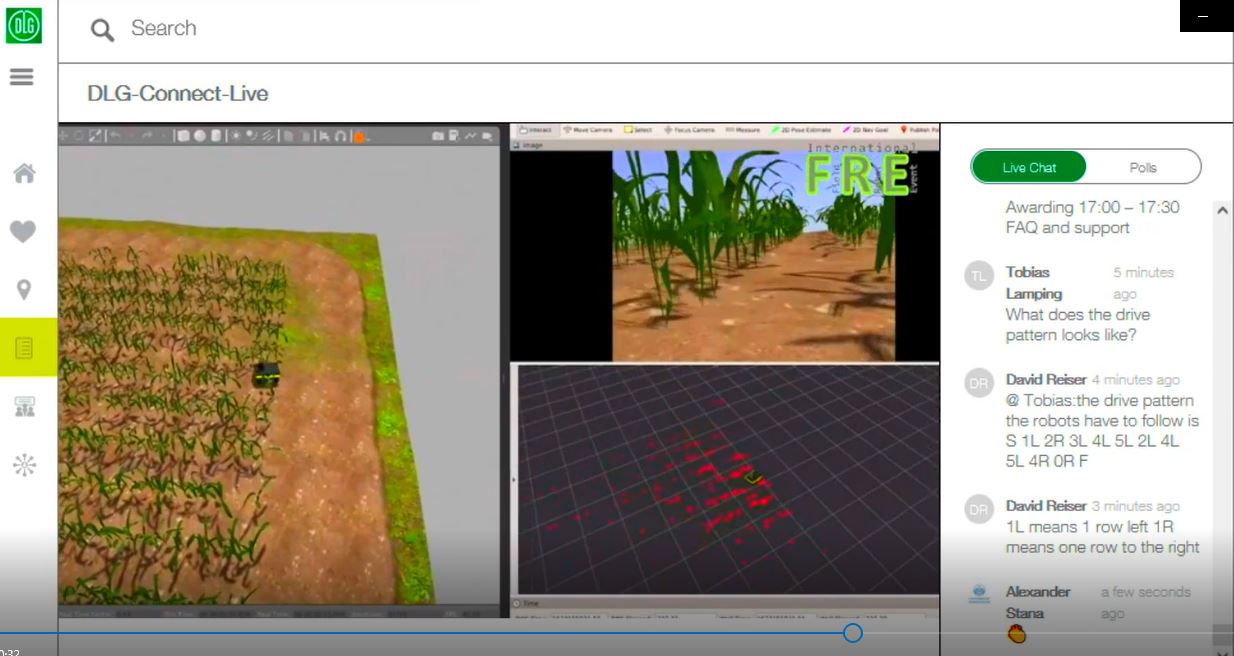
งานนี้ดึงดูดผู้ชม 518 คนจากทั่วทุกมุมโลก ไม่เพียงแต่ผู้เชี่ยวชาญทางเทคนิคและวิชาการ วิศวกร เจ้าหน้าที่มหาวิทยาลัย และนักศึกษาเท่านั้น แต่ยังรวมถึงเกษตรกรจากหลากหลายประเทศด้วย ผู้เข้าร่วมในอุตสาหกรรม เช่น ผู้จัดการผลิตภัณฑ์ ยังได้เข้าร่วมการถ่ายทอดสดซึ่งมีนักข่าวจากต่างประเทศเข้าร่วมด้วย เพื่อรับชมหุ่นยนต์ที่แสดงในสภาพแวดล้อมการจำลองภาพที่เหมือนจริงซึ่งคล้ายกับที่ NASA ใช้สำหรับการสำรวจอวกาศ ผ่านการแชทสด ผู้ชมมีโอกาสโต้ตอบกับทีมนานาชาติ 14 ทีมจากเดนมาร์ก เยอรมนี เนเธอร์แลนด์ โรมาเนีย และสโลวีเนีย ตลอดจนผู้เชี่ยวชาญและผู้ชมอื่นๆ
รางวัลความร่วมมือพัฒนาไร่ข้าวโพดเสมือนจริง
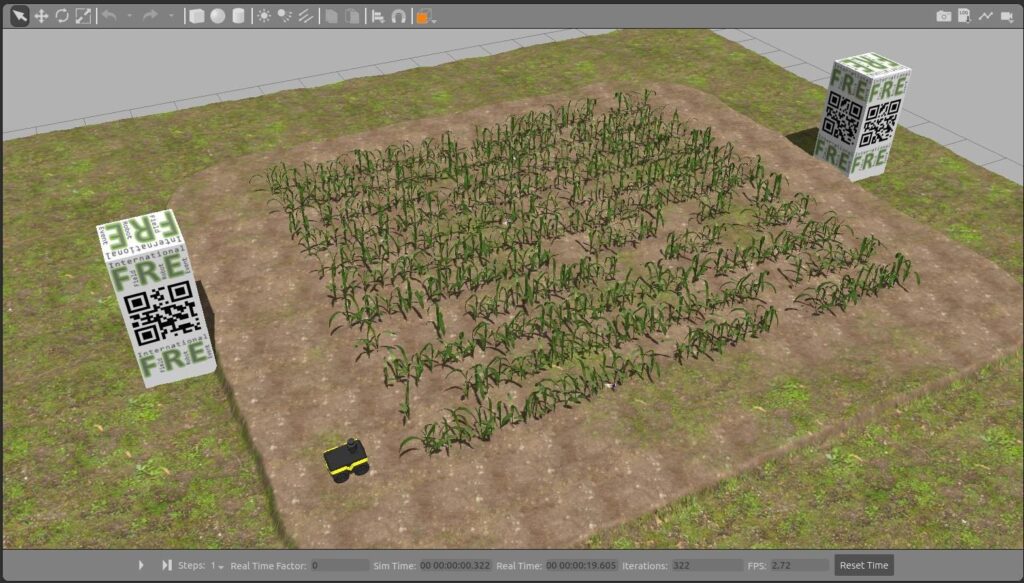
รางวัล Collaboration Award กิตติมศักดิ์นี้มอบให้กับ Kamaro Engineering ซึ่งเป็นทีมวิศวกรรมนักศึกษาสำหรับหุ่นยนต์ภาคสนามที่เป็นนวัตกรรมจาก Karlsruhe Institute of Technology (KIT) รางวัลความร่วมมือนี้มอบให้กับการมีส่วนร่วมในการพัฒนาทุ่งข้าวโพดเสมือนจริงในสภาพแวดล้อมจำลอง งานนี้เกี่ยวข้องกับการเขียนโค้ดที่อธิบายได้อย่างถูกต้องว่าต้นข้าวโพดและส่วนประกอบอื่นๆ เป็นอย่างไร รวมทั้งสร้างผลกระทบในชีวิตจริง เช่น ลมและเงาเพื่อสร้างสถานการณ์ภาคการเกษตรที่หลากหลาย โดยเฉพาะอย่างยิ่งการจดจำวัชพืชและการตรวจจับสิ่งกีดขวาง
สองทีมพรสวรรค์ในวัยเรียน
ในปีนี้ สองทีม – Carbonite และ Camper Robotic – ประกอบด้วยเด็กวัยเรียนที่มีความสามารถด้านเทคนิคจากเมืองในเยอรมนี ฮัมบูร์ก และ Überlingen ตามลำดับ ทีมงาน Camper Robotic ได้พัฒนาหุ่นยนต์ประเภท "Segway" ที่ไม่เหมือนใครซึ่งเรียกว่า Field Balancer ทีม Carbonite เก่งในหลายงาน โดยมาเป็นอันดับสามโดยรวม
“กิจกรรมเสมือนจริงนี้เพิ่งเปิดตัว และเรายินดีเป็นอย่างยิ่งกับผลลัพธ์และคำติชมจากนักเรียน สภาพแวดล้อมจำลองเป็นส่วนสำคัญของงานพัฒนาหุ่นยนต์ภาคสนาม ฉันเชื่อว่าเหตุการณ์นี้ซึ่งเกิดขึ้นจริงในสภาพแวดล้อมจำลอง เป็นการฝึกหัดที่ยอดเยี่ยมและท้าทายที่ไม่เพียงแต่สร้างสิ่งที่ระบบสามารถทำได้ แต่ยังเปรียบเทียบกับทีมอื่นๆ ด้วย สิ่งนี้จะมีประโยชน์ในการเรียนรู้อย่างมากในหลายเดือนข้างหน้า” Prof. Hans W. Griepentrog ผู้อำนวยการแผนกเทคโนโลยีในการผลิตพืชผล มหาวิทยาลัย Hohenheim ประเทศเยอรมนี กล่าว
“สภาพแวดล้อมการจำลอง ROS Gazebo ที่เราสร้างขึ้นโดยเฉพาะสำหรับงานนี้ มีประโยชน์สำหรับทีมนักเรียน ดังนั้นเราจึงตัดสินใจที่จะให้มันพร้อมใช้งานหลังการแข่งขัน เพื่อให้นักเรียนสามารถทดสอบการจำลองหุ่นยนต์ภาคสนามในอนาคตของพวกเขาบนแพลตฟอร์มนั้น ศาสตราจารย์ Griepentrog กล่าวสรุป
งานฟรีสไตล์ – แนวคิดในอนาคต
งานฟรีสไตล์ภายในงานถือเป็นไฮไลท์ของผู้ชมเสมอและเป็นหน้าต่างสู่อนาคตด้วยแนวคิดที่มีวิสัยทัศน์สำหรับการใช้งานภาคสนาม ซึ่งคัดเลือกและพัฒนาโดยทีมงานเอง หมวดหมู่ที่ไม่บังคับในการประกวด งานนี้เปิดโอกาสให้ทีมนักเรียนได้แสดงทักษะในการพัฒนาโซลูชันสำหรับงานภาคสนามที่พวกเขาเลือก ในงานปีนี้ นักเรียนนำเสนองานฟรีสไตล์ในรูปแบบวิดีโอ งานฟรีสไตล์รวมถึงหุ่นยนต์เก็บเกี่ยวจากเซเรสซึ่งชนะประเภทฟรีสไตล์ อันดับที่สองซึ่งพัฒนาโดยทีม FarmBeast มหาวิทยาลัย Maribor เป็นอุปกรณ์ฉีดพ่นที่สามารถตรวจจับวัชพืชและฉีดพ่นเป้าหมายได้เฉพาะเมื่อจำเป็นเท่านั้น ซึ่งมีส่วนช่วยในการปกป้องดิน อันดับที่สามคือทีม Kamaro ที่มีหุ่นยนต์ภาคสนาม Beteigeuze ซึ่งนำเสนอตัวเองเป็นหุ่นยนต์ภาคสนามที่กำหนดค่าตัวเองได้เองแบบแยกส่วนพร้อมสิ่งที่แนบมาหลายอันรวมถึงอุปกรณ์ที่ใช้เทรลเลอร์
งานหุ่นยนต์ภาคสนามระดับนานาชาติเป็นการประกวดหุ่นยนต์ภาคสนามระดับนานาชาติที่ครอบคลุมงานภาคสนามต่างๆ การนำทางหุ่นยนต์ระหว่างแถวพืชผลโค้ง การจดจำวัตถุที่เป็นวัชพืชหรือเพียงแค่ขยะ และการทำแผนที่วัตถุโดยใช้การอ้างอิงทางภูมิศาสตร์เป็นส่วนหนึ่งของความท้าทายที่หุ่นยนต์ภาคสนามแก้ไขโดยใช้เซ็นเซอร์และอัลกอริธึม การตีความข้อมูลแบบเรียลไทม์ เช่น การพิจารณาว่าวัชพืชชนิดใดโดยใช้กล้องถ่ายภาพนั้นซับซ้อน และต้องใช้เวลาหลายเดือนในการพัฒนาก่อนหน้านั้น งานเพิ่มเติมจำเป็นต้องมีการกำจัดวัชพืชและเศษขยะ ซึ่งจำเป็นต้องมีการควบคุมซอฟต์แวร์ที่แม่นยำของแอคทูเอเตอร์ที่ใช้เครื่องมือ ความท้าทายคือการทำความเข้าใจข้อมูลอย่างชาญฉลาดในวันนั้น ซึ่งหุ่นยนต์จะตีความข้อมูลที่ได้รับและตัดสินใจอย่างเหมาะสมที่สุด ความซับซ้อน ประสิทธิภาพ และประโยชน์ทางการเกษตรเป็นเกณฑ์การตัดสินที่สำคัญ
มีวิดีโอการแข่งขัน
วิดีโอตามคำขอของกิจกรรมหุ่นยนต์ภาคสนามสามวัน ซึ่งรวมถึงงานภาคสนามที่จำลองขึ้นทั้งหมด คำวิจารณ์ของผู้ตัดสิน และวิดีโอที่ส่งโดยทีมสำหรับงานฟรีสไตล์ มีอยู่ในแพลตฟอร์มออนไลน์ของ DLG เป็นลิงก์แยกสำหรับแต่ละวันของงาน:
8 มิถุนายน: การนำทางในทุ่งข้าวโพดที่มีแถวโค้ง แถวตรงที่มีต้นไม้หายไป ลิงค์
9 มิถุนายน: การตรวจจับวัชพืชและวัตถุและการอ้างอิงทางภูมิศาสตร์ การกำจัดไปที่แหลม ลิงค์
10 มิถุนายน: กิจกรรมฟรีสไตล์ ลิงค์
รายละเอียดผู้ชนะของแต่ละหมวดจากทั้ง XNUMX ประเภทและคะแนนสามารถดูได้ที่ https://www.fieldrobot.com/event/
งานหุ่นยนต์ภาคสนามระดับนานาชาติจัดขึ้นบนแพลตฟอร์มดิจิทัลของ DLG ซึ่งเป็นที่ตั้งของกิจกรรมการเกษตรดิจิทัลขนาดใหญ่ด้วย แพลตฟอร์มนี้เป็นแพลตฟอร์มการเชื่อมต่อที่ให้ผู้ใช้ทั้งเนื้อหาผลิตภัณฑ์และการโต้ตอบส่วนบุคคล กลุ่มหรือสาธารณะ
การวิจัยหุ่นยนต์ภาคสนามเชิงปฏิบัติตั้งแต่ปี 2003
การประกวดหุ่นยนต์ภาคสนามซึ่งเปิดตัวในปี 2003 โดยมหาวิทยาลัย Wageningen ในเนเธอร์แลนด์ เป็นการทดสอบหุ่นยนต์บุกเบิกและเทคโนโลยีการทำฟาร์มที่แม่นยำภายใต้สภาพการใช้งานจริง และเปิดโอกาสให้นักวิทยาศาสตร์รุ่นเยาว์ได้แลกเปลี่ยนและพัฒนาความคิดร่วมกับเพื่อนๆ เช่นเดียวกับงานภาคสนาม ผู้เข้าแข่งขันในงานเสมือนจริงมีโอกาสที่จะมีปฏิสัมพันธ์ระหว่างกันและกับผู้ชมจากต่างประเทศ ปฏิสัมพันธ์นี้เป็นส่วนสำคัญของงานและช่วยให้พวกเขาพัฒนาแนวคิดของตน
งานหุ่นยนต์ภาคสนามปี 2021 ซึ่งจัดขึ้นที่นิทรรศการ DLG-Feldtage ตั้งแต่ปี 2014 ได้จัดให้มีการทดสอบเสมือนจริงสำหรับหุ่นยนต์และนักประดิษฐ์ ตลอดจนความบันเทิงที่น่าตื่นเต้นสำหรับผู้ชมเสมือนจริง]

{kind=link}